24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
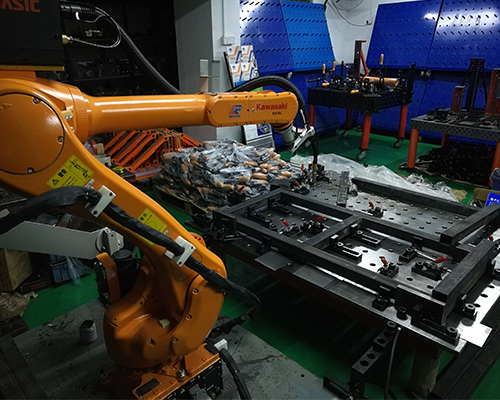
首先之所以用到加工时因为其有4大优势:1,可以保证焊接的质量和稳定;2,OTC机器人做工效率相对于人工更高,可以提高产量;3,机器人代替普通焊工,可以降低日益增长的人工成本即节约成本;4,可以将人工从辐射和燥热的环境中解救出来。其次,考虑焊接机器人量一定要有一定的基础,种类也是其一,量大的产品用肯定合适,但是产量小,产品种类繁多的话就不太合适了,因为编程需要大量的时间和精力。最后,加工工件的薄厚问题,由于我们现在材料的问题,4毫米以下材料的加工会出现部分偏差,需要再加上传感器的帮助才可以实现,但这部分又是多余的成本。所以根据“质量、种类、数量、厚度”几个方面卡率是否需要焊接机器人的“帮忙”。
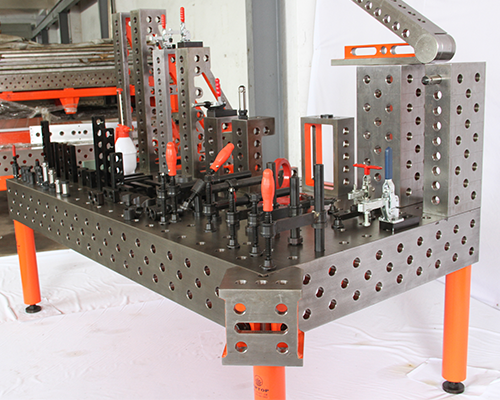
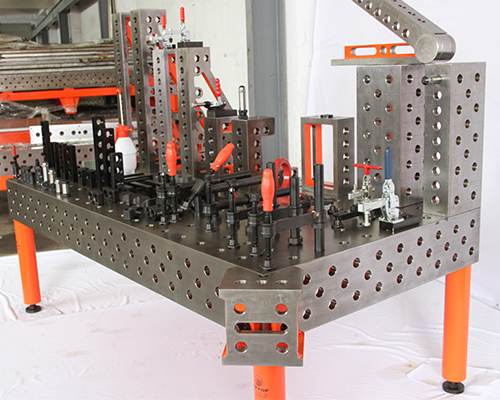
说到除焊接主体以外,还必必要用到焊接工装夹具,由于它能够将焊件精准的定位,便利焊接的进行和包管精度,有助于进步产物品质,同时还能够减轻工人的劳动量。作为的工装夹具,天然不像其余装备那么简略,必必要符合必定的设计请求能力予以利用。比如说焊接机械人工装夹具夹紧时不该损坏焊件的表面品质,特别以在夹紧薄件的时刻,应限定夹紧力或许采纳压头行程限位、加大压头接触面积、添补铜、铝衬套等步伐,做到夹紧靠得住,刚性恰当。 不仅是表面品质,焊接的定位位置和多少外形也不能被焊接机械人的工装夹具影响,要做到夹紧后既不使焊件松动滑移,又不使焊件的拘谨渡过大而生产较大的应力,这是最根本的、其次,焊接机械人工装夹具的施力点应位于焊件的支承处或许布置在靠近支承的地方,并且要防止支承反力与夹紧力、支承反力与重力构成力偶。为了便于节制,在同一个夹具上,定位器和夹紧机构的布局情势不宜过量,并且尽量只选用一种动力源。既然是与焊接机械人共同利用,那么它本身应举措敏捷、操纵便利,操纵位置应处在工人轻易靠近、最易操纵的部位。当夹具处于夹紧状况时,应能自锁;同时还要有充足的安装、焊接空间,所有的定位元件和夹紧机构应与焊道坚持恰当的间隔。焊接机械人的工装夹具除具备上述特性以外,在自动化、机械化等方面都起着异常紧张的作用,是焊接事情可否完成高速、高效、周详、复合、智能、环保等目标的症结地点。

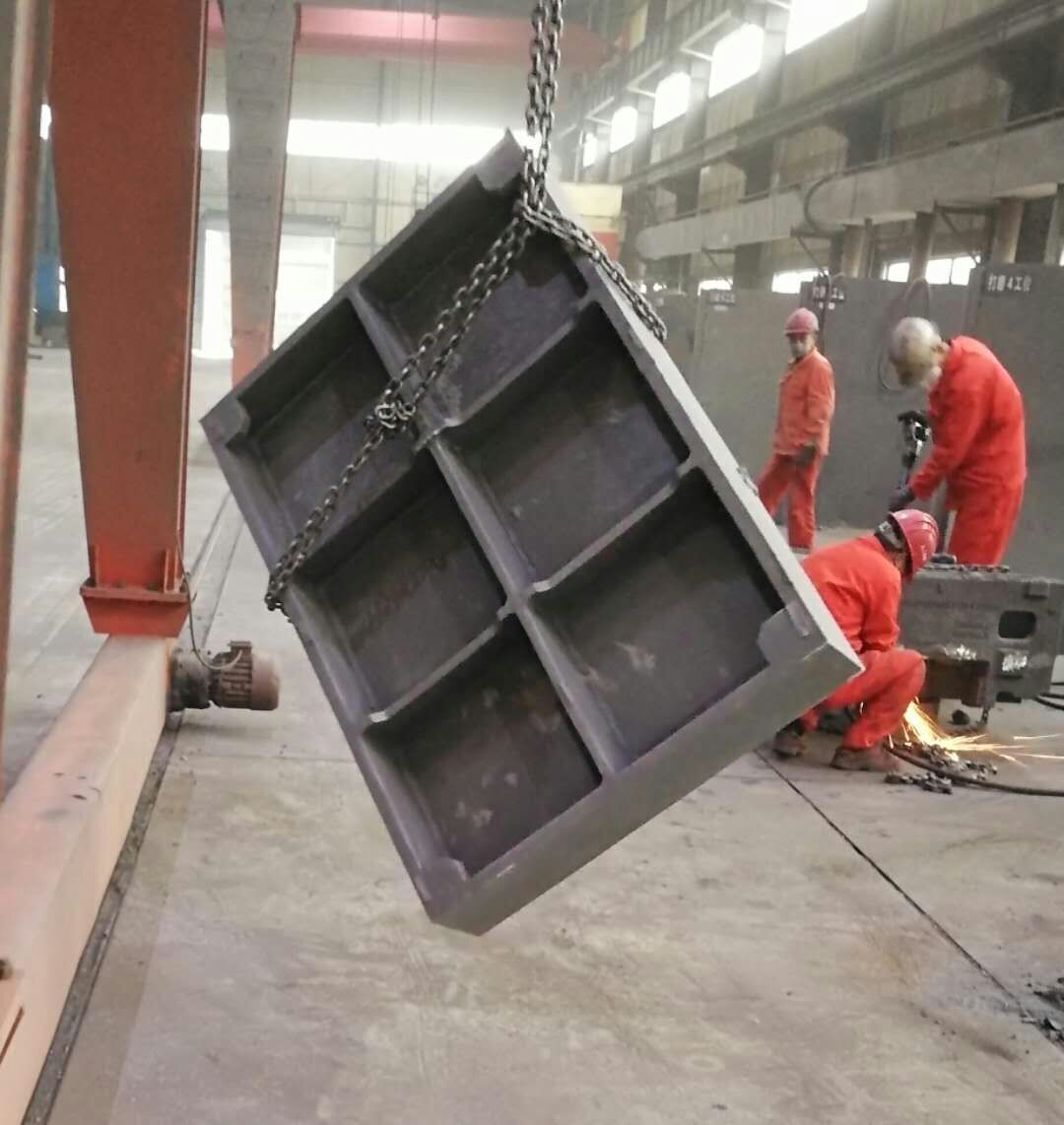
是一个加热和冷却相结合的过程,所以在这一过程中,焊接区有可能会因为受到工件本体的拘谨而不能自在胀大和缩短,但在冷却后在便产生焊接应力和变形。当然这是传统焊接工艺的缺陷,焊接机器人的运用已经解决了这一问题,纠正了焊接变形。像这样的现代焊接设备,加上已经成熟的焊接技术,能焊出优异的焊缝。焊接接头处的强度除受焊缝质量影响外,还与其几许形状、尺度、受力状况和作业条件等有关,而对接接头焊缝的横截面形状,决定于被焊接体在焊接前的厚度和两接边的坡口方式。在利用焊接机器人焊接较厚的钢板时,为了焊透而在接边处开出各种形状的坡口,以便较容易地送入焊条或焊丝。挑选坡口方式时,除确保焊透外还应思考施焊便利,填充金属量少,焊接变形小和坡口加工费用低等要素。而如果是换成两块不一样的钢板,为避免截面急剧改变引起严重的应力会集,常把较厚的板边逐步削薄,达到两接边处等厚。在交变、冲击载荷下或在低温高压容器中作业的联接,常优先选用对接接头的焊接。将来的焊接技能,一方面要研发更先进的焊接办法、焊接设备和焊接材料,以进一步提高焊接质量和安全可靠性。另一方面要进步焊接机械化和主动化水平,就是像焊接机器人这样的设备的运用。
的使用非常的普遍,焊接机器人就是其中非常突出的例子。其成长的过程非常迅速,而且在焊接实现的效果上也能达到预想的效果,在竞争和生产不至于处于非常被动的地位,才有发展的空间。整体实力的增长将带动整个工业机器人的发展,才能使得自动化生产取得一定的主动。1.在焊接机器人等的发展这些年,通过吸收国外技术和自身的投入,掌握住核心先进技术或者逐渐的追上国际先进水平,在技术上说的话才是竞争力的核心。2.技术的进步在实现上就需要高水平的精密技术配合,精密技术一直以来就是衡量制造生产水平的关键,也是设备实现高精密结合,是机器人在结合精密度上有很大的配合。在关节方面有着重要的作用。3.实现高精度与高技术的配合是国内的加工制造水平提高,能够在在产品的使用上实现规模化生产,各种加工设备的配套上线是整个的基础。这几年的开展时间内机器人市场竞争十分激烈,一方为国产,一方为进口,国产企业和产品在最近几年的开展时间里得政策的扶持以及很长时间内的技术积聚在产质量量上有很大进步,另外企业关于如今市场的认识足够深入,构成一个具有竞争力的整体,并在市场获得一定的位置,而国外产品则以日系,美系以及欧系为三个方面,在技术兴旺的三个国度内构成三种不同的开展形式,因技术才能,构成强大的竞争实力
奉化焊接机器人自从被研制成功之后,在实践中也得到了广泛的应用,而它之所以能精确的完成各种复杂的焊接工艺,完全是靠相应程序的编制。关于焊接机器人的编程是有技巧的,大家想掌握吗?在编织程序之前,首先要选择合理的焊接顺利,目的是为了减小焊接变形,所以可以按照焊枪行走路径长度来制定焊接顺序。而对于焊枪空间过渡,最基本的要求是移动轨迹较短、平滑、安全;在此基础上优化焊接参数,为了获得最佳的焊接参数,可以通过制作工作试件进行焊接试验和工艺评定。其次,考虑到变位机位置、焊枪姿态、焊枪相对接头的位置与焊接要求匹配,要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置。同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。成一定长度的焊接程序编写后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,有助于保证焊枪的清洁,提高喷嘴的寿命。总之,编制焊接机器人的运行程序一般不能一步到位,要在机器人焊接过程中不断检验和修改、调整。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


