24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
进行焊接作业的时候,其熔池温度的高低与很多因素有关,包括焊条角度、焊接时间、焊条直径、焊接方法等因素,所以一旦发现熔池温度过高,就需要从这几方面入手实现降温。焊接机器人焊接过程中,焊条与焊接方向的夹角在90度时,电弧集中,熔池温度高;而夹角小,电弧分散,熔池温度较低。比如在进行12mm平焊封底层的时候,焊条角度应控制在50-70度,使熔池温度有所下降,避免了背面产生焊瘤或起高。其次,要严格控制焊接机器人系统电弧燃烧时间,断弧的频率和电弧燃烧时间直接影响着熔池温度,由于管壁较薄,电弧热量的承受能力有限,如果放慢断弧频率来降低熔池温度,易产生缩孔,所以只能用电弧燃烧时间来控制熔池温度,避免管子内部焊缝超高或产生焊瘤。正常情况下,要求根据焊缝空间位置、焊接层次来选用焊接电流和焊条直径,开焊时选用的焊接电流和焊条直径较大,立、横仰位较小。只有这样,才能更加容易控制熔池温度,使得焊缝成形。 根据以往的经验,焊接机器人采用圆圈形运条时熔池温度高于月牙形运条温度,月牙形运条温度又高于锯齿形运条的熔池温度,所以尽量采用锯齿形运条,并且用摆动的幅度和在坡口两侧的停顿,有效的控制了熔池温度。

是一个加热和冷却相结合的过程,所以在这一过程中,焊接区有可能会因为受到工件本体的拘谨而不能自在胀大和缩短,但在冷却后在便产生焊接应力和变形。当然这是传统焊接工艺的缺陷,焊接机器人的运用已经解决了这一问题,纠正了焊接变形。像这样的现代焊接设备,加上已经成熟的焊接技术,能焊出优异的焊缝。焊接接头处的强度除受焊缝质量影响外,还与其几许形状、尺度、受力状况和作业条件等有关,而对接接头焊缝的横截面形状,决定于被焊接体在焊接前的厚度和两接边的坡口方式。在利用焊接机器人焊接较厚的钢板时,为了焊透而在接边处开出各种形状的坡口,以便较容易地送入焊条或焊丝。挑选坡口方式时,除确保焊透外还应思考施焊便利,填充金属量少,焊接变形小和坡口加工费用低等要素。而如果是换成两块不一样的钢板,为避免截面急剧改变引起严重的应力会集,常把较厚的板边逐步削薄,达到两接边处等厚。在交变、冲击载荷下或在低温高压容器中作业的联接,常优先选用对接接头的焊接。将来的焊接技能,一方面要研发更先进的焊接办法、焊接设备和焊接材料,以进一步提高焊接质量和安全可靠性。另一方面要进步焊接机械化和主动化水平,就是像焊接机器人这样的设备的运用。
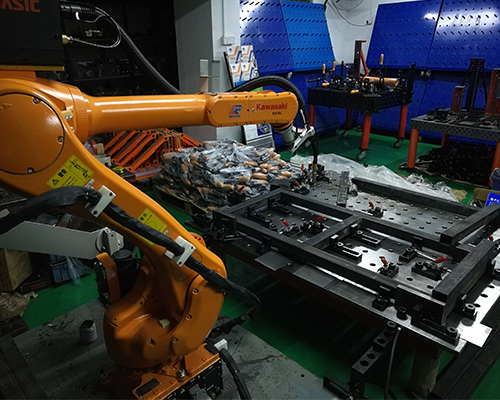
早期只在点焊中得到应用,随着计算机技术、传感器技术的发展,弧焊机器人逐渐得到普及,特别是近十几年来由于经济的高速发展,市场的激烈竞争使那些用于中、大批量生产的焊接自动化专机已不能适应小规模、多品种的生产模式逐渐被具有柔性的焊接机器人代替,焊接机器人得到了巨大的发展,焊接已成为工业机器人应用的大领域之一,在汽车、摩托车、工程机械等领域都得到了广泛的应用。目前世界拥有的80余万台工业机器人中,用于焊接的机器人可达40%以上。机器人焊接时的主要注意事项 1.必须进行示教作业, 在机器人进行自动焊接前,操作人员必须示教机器人焊枪的轨迹和设定焊接条件等。由于必须示教,所以机器人不面向多品种少量生产的产品焊接。 2.必须确保工件的精度。机器人没有眼睛,只能重复相同的动作。机器人轨迹精度为±0.1mm,以此精度重复相同的动作。焊接偏差大于焊丝半径时,有可能焊接不好,所以工件精度应保持在焊丝半径之内。3.焊接条件的设定取决于示教作业人员的技术水平。操作人员进行示教时必须输入焊接程序,焊枪姿态和角度,电流、电压、速度等焊接条件。示教操作人员必须充分掌握焊接知识和焊接技巧。 4.必须充分注意安全,机器人是一种高速的运动设备,在其进行自动运行时绝对允许人靠近机器人。操作人员必须接受劳动安全方面的专门教育,否则不准操作。

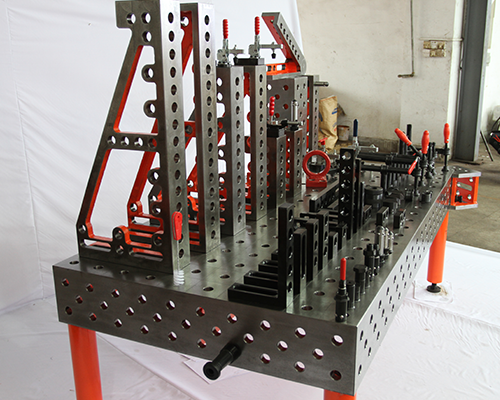
说到销售搬运机器人除焊接主体以外,还必必要用到焊接工装夹具,由于它能够将焊件精准的定位,便利焊接的进行和包管精度,有助于进步产物品质,同时还能够减轻工人的劳动量。作为搬运机器人的工装夹具,天然不像其余装备那么简略,必必要符合必定的设计请求能力予以利用。比如说焊接机械人工装夹具夹紧时不该损坏焊件的表面品质,特别以在夹紧薄件的时刻,应限定夹紧力或许采纳压头行程限位、加大压头接触面积、添补铜、铝衬套等步伐,做到夹紧靠得住,刚性恰当。 不仅是表面品质,焊接的定位位置和多少外形也不能被焊接机械人的工装夹具影响,要做到夹紧后既不使焊件松动滑移,又不使焊件的拘谨渡过大而生产较大的应力,这是最根本的、其次,焊接机械人工装夹具的施力点应位于焊件的支承处或许布置在靠近支承的地方,并且要防止支承反力与夹紧力、支承反力与重力构成力偶。为了便于节制,在同一个夹具上,定位器和夹紧机构的布局情势不宜过量,并且尽量只选用一种动力源。既然是与焊接机械人共同利用,那么它本身应举措敏捷、操纵便利,操纵位置应处在工人轻易靠近、最易操纵的部位。当夹具处于夹紧状况时,应能自锁;同时还要有充足的安装、焊接空间,所有的定位元件和夹紧机构应与焊道坚持恰当的间隔。焊接机械人的工装夹具除具备上述特性以外,在自动化、机械化等方面都起着异常紧张的作用,是焊接事情可否完成高速、高效、周详、复合、智能、环保等目标的症结地点。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


