24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

这个问题提的很好,只有通过问题才能把三维焊接平台的价格搞清楚,才能知道贵在哪里。传统的焊接平台为是什么又不如三维焊接平台呢。今天我就把这个热点话题跟大家聊一下,用户应该细心的观看这篇文章,看看是否能和你想的一样不!一:贵在精度上。传统的焊接平台是龙门铣床加工的,精度是三级精度,平面度的误差应该在20丝,这样的焊接精度已经很高了,但是依然不能和三维焊接平台相比,三维柔性焊接平台以数控龙门铣床精铣加工,精度达到1级,平面度误差咋5丝,可见价格贵东西还是有很大区别的。二:三维柔性焊接平台贵在材质上。优质的三维平台采用HT300材质,光铸造就比传统的焊接平台提高了2000元一吨,你说这样优质的原料能不贵吗!

自从被研制成功之后,在实践中也得到了广泛的应用,而它之所以能精确的完成各种复杂的焊接工艺,完全是靠相应程序的编制。关于的编程是有技巧的,大家想掌握吗?在编织程序之前,首先要选择合理的焊接顺利,目的是为了减小焊接变形,所以可以按照焊枪行走路径长度来制定焊接顺序。而对于焊枪空间过渡,最基本的要求是移动轨迹较短、平滑、安全;在此基础上优化焊接参数,为了获得最佳的焊接参数,可以通过制作工作试件进行焊接试验和工艺评定。其次,考虑到变位机位置、焊枪姿态、焊枪相对接头的位置与焊接要求匹配,要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置。同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。成一定长度的焊接程序编写后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,有助于保证焊枪的清洁,提高喷嘴的寿命。总之,编制焊接机器人的运行程序一般不能一步到位,要在机器人焊接过程中不断检验和修改、调整。
缺陷的解决方式: (1)出现气孔可能为气体保护差、工件的底漆太厚或者保护气不够干燥,进行相应的调整就可以处理。(2)出现焊偏可能为焊接的位置不正确或焊枪寻找时出现问题。这时,要考虑TCP(焊枪中心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下各轴的零位置,重新校零予以修正。(3)飞溅过多可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。(4)焊缝结尾处冷却后形成一弧坑,编程时在工作步中添加埋弧坑功能,可以将其填满。(5)出现咬边可能为焊接参数选择不当、焊枪角度或焊枪位置不对,可适当调整功率的大小来改变焊接参数,调整焊枪的姿态以及焊枪与工件的相对位置

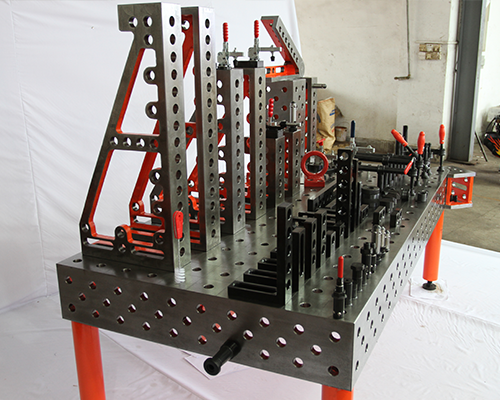
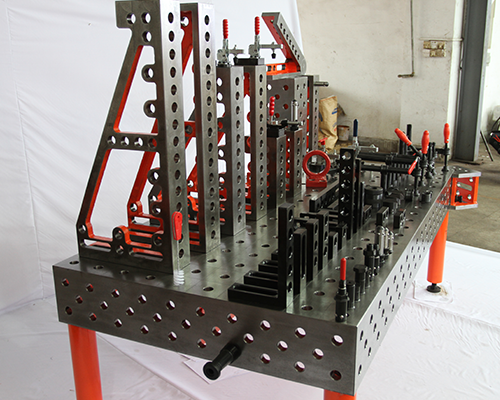
其实也就是一个可供焊接时使用的平台,但正因为是供焊接时要使用的,而焊接时所产生的火花和对电的使用,也注定了焊接平台的不平凡,那么焊接的平台的组成部分都包含哪些呢?1、焊接:专为制品的制造而设计的通用夹具;用于焊接十分方便、灵活、精确,与传统的焊接方式先进许多。2、三维:代表三个方向一般夹具都是纵向和横向没有垂直方向。平台大面有二个方向,四周边可用作垂直方向的安装,从而达到立体组合。3、孔系:主要特点就是从平台到附件都是标准孔没有传统的螺纹或t型槽,配合快速锁销就能使装配变得更加快捷方便,定位更精确。4、柔性:一套夹具就可完成几个产品或几十个产品的需求,从而大大的加快了产品的研发、试制的进程,节省大量的人力、物力和财力(环保和低碳产品)。5、组合:根据产品的需求任意组合及调整。上述的前1-4点并不是每一次使用都要全部使用上的,第5点的说明就是为了告诉我们,是可以组合的,而至于如何组成,这个恕小编没有办法跟大家说的很明白,那是因为组合的方法是根据每次使用的需求来的,并没有什么统一的标准。当然,你要是有不会组合的,可以来咨询我们

当在使用时,它与定位器的弯曲不可分离。 那么,你知道如何选择合适的焊接机器人定位器吗? 我们来看看小编的焊接机器人: 1.该设备为操作员提供保护,以防止辐射和飞溅。2.和定位器一起工作以改善焊接的可接近性。3.焊接薄板时,可以通过位移提高焊接速度,也可以实现垂直焊接。4.人机界面友好。5.焊接机器人焊接时,可以使用两套工作台。 当一组工作台在运行时,操作员可以在另一组工作台上装载或卸载工件。 6.当焊缝处于平焊位置时,尤其是焊接临界厚度焊缝时,这一点尤其重要。 7.减少机器人的重复定位,即缩短循环时间,减少生产线上割炬软管的磨损。
阳江工业机器人的编程技巧:(1)焊枪空间过渡要求移动轨迹较短、平滑、安全。 (2)选择合理的焊接顺序。以减小焊接变形、焊枪行走路径长度来制定工业机器人顺序。(3)优化焊接参数。为了获得最佳的焊接参数,制作工作试件进行焊接试验和工艺评定。4)合理的变位机位置、焊枪姿态、焊枪相对接头的位置。工件在变位机上固定之后,若焊缝不是理想的位置与角度,就要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置,同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。工件的位置确定之后,焊枪相对接头的位置通过编程者的双眼观察,难度较大。这就要求编程者善于总结积累经验。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


