24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
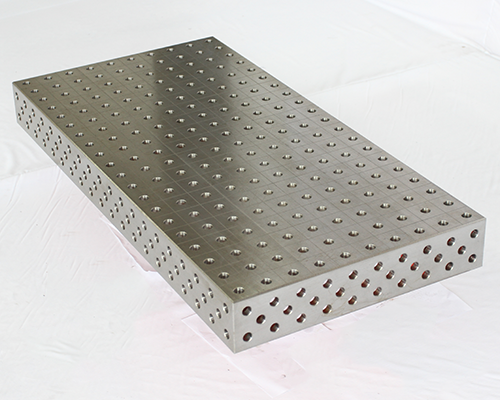
最近比较流行,好几个版本,有铸铁材质的,钢件的,那么那种材质的好呢?实际上不管那种只要符合实际的要求就行了。非要弄出个结果来那就只能对比和实际的出处分析。首先从加工环节都是一致的,唯独表面的处理出现了差异,这就是三维焊接平台的一个主要的区分!电焊工作者的以前就是一个平面,没法定位,但是出现了带孔的,带夹具的就能够把工作效率提高。当焊接时候就会有焊把字掉下来,沾到台面上。表面处理就是为了把焊渣子调到台面上后不沾,清扫即可!目前在流行的就是襂淡处理,这样的工艺经过试验很好的解决了这个问题!目前这个工艺还处在一个比较什么保守阶段,受到技术条件的影响,价格偏贵,所以市面上不多,经过不久的进来,也许有个3年左右的时间吧就会普及!
的系统构成完整的焊接机器人系统一般有如下几部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪和焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。根据用途,将工业机器人配置不同的焊接系统,将组成不同的系统。弧焊机器人弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。 弧焊机器人是包括电弧焊附属装置在内的柔性焊接系统,而性能有特殊的要求。在弧焊作业中,焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此运动过程中的速度稳定性和轨迹精度是两项重要指标。一般情况下,焊接速度约为5~50㎜/s,轨迹精度约为±(0.2~0.5)㎜。由于焊枪的姿态对焊缝质量有一定的影响,因此希望在跟踪焊道的同时,焊枪姿态的可调范围尽量大,其一些基本性能要求如下所示:设定焊接条件(电流、电压、速度等);摆动功能;坡口填充功能;焊接异常功能检测;焊接传感器(起始点检测、焊道跟踪)的接口功能。点焊机器人汽车工业是点焊机器人系统一个典型的应用领域。最初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:安装面积小,工作空间大;快速完成小节距的多点定位;定位精度高,以确保焊接质量;持重大,以便携带内装变压器的焊钳;内存容量大,示教简单,节省工时;点焊速度已生产线相匹配,同时按全可靠性好。
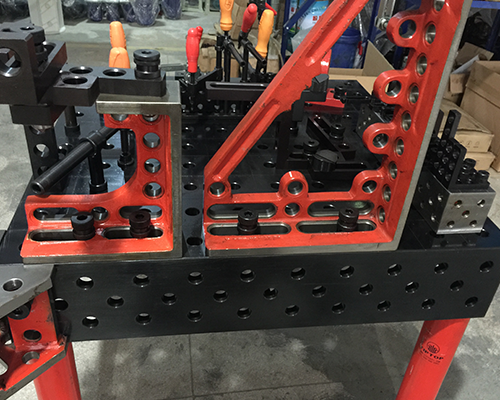
产品的设计有的时候对于产品的整个销量还是有影响的,如果他这个产品在设计的时候没有一个比较好的设计理念的话,这样的产品到了市场上面是没有太大的商量的,因为三维柔性焊接平台设计理念是非常的好的,也是可以满足很多消费者的需求,所以他们在市场上面还是很受欢迎的。尤其是三维柔性焊接平台的设计外观,也是比一般的产品要好很多的,因为现在很多人还是比较喜欢外观好看的产品。毕竟现在有很多的产品,它们的功能都是差不多的,都是可以帮助企业解决问题,但是企业到底选择购买什么样的产品,其实也是要考虑好这个产品的设计理念的,如果,三维柔性焊接平台,焊接工作台的设计理念比较差的话,这样的产品虽然说质量是没有问题的,但是仍然是无法满足消费者的需求,所以市场上面自然是没有太大的销量。因为,三维柔性焊接平台是有这样的优势的,所以受到人们欢迎。所以对于一些生产的企业,他们也是要考虑好这些问题的,如果自己购买一些生产理念并不是很好的产品回来的话,可能也是造成一种极大的浪费的,因为这些产品并不能帮助我们解决问题的,反倒是给我们带来了一定的压力的,所以对于这些企业,他们也要做出一个慎重的选择的,如果他们可以使用三维柔性焊接平台,就是不用担心这么麻烦的,也是可以很好的帮助自己发展。
销售焊接机器人般是与焊接滚轮架、焊接变位机等组合使用的,多在些制造焊接之类的工厂使用,这种机器使用起来方便快捷,人只需要在操控台操控它工作。这种高科技智能产品是怎么设计的呢?今天博塔重工带我们来探究竟。焊接操作机设计方案应遵循6大原则1、工艺性,仅有合理的结构设计而无良好的工艺性,必然导致操作机性能的降低和成本的提高。焊接机器人是种高精度、高集成度的自动机械系统,良好的加工和装配工艺性是设计时要体现的重要原则之。2、高强度材料选用,由于操作机从手腕、小臂、大臂到机座是依次作为负载起作用的,选用高强度材料时应以减轻零部件的质量为准则。3、可靠性,般来说,元器件的可靠性应高于部件的可靠性,而部件的可靠性应高于整机的可靠性。可以通过概率设计方法设计出可靠度满足要求的零件或结构,也可以通过系统可靠性综合方法评定操作机系统的可靠性。焊接操作机因机构复杂、环节较多,可靠性问题显得尤为重要。4、刚度设计,操作机设计中刚度是比强度更重要的问题,要使刚度大,必须恰当地选择杆件剖面形状和尺寸,提高支承刚度和接触刚度,合理地安排作用在臂杆上的力和力矩,尽量减少杆件的弯曲变形。5、尺度规划优化原则,当设计要求满足定工作空间要求时,通过尺度优化以选定小的臂杆尺寸,这将有利于焊接操作机刚度的提高,使运动惯量进步降低。6、运动惯量,由于焊接操作机运动部件多,运动状态经常改变,必然产生冲击和振动,采用小运动惯量原则,可增加操作机运动平稳性,提高操作机动力学性。为此,在设计时应注意在满足强度和刚度的前提下,尽量减小运动部件的质量,并注意运动部件对转轴的质心配置。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


