24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

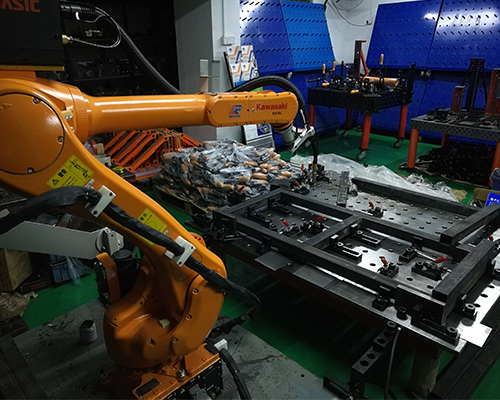
具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。焊接机器人硬件部分采用的是柔性控制,将PLC和触摸屏完美结合之后,就能实现控制的自动化、远程,化从而有效的达到高精度的控制效果。由于焊接机器人针对不同规格,不同形状的产品,它的控制方式也是不同的,因此要注意从各方面使硬件部分达到最佳。另外,从焊接机器人的械结构、控制方式、产能要求、环保要求

的使用非常的普遍,焊接机器人就是其中非常突出的例子。其成长的过程非常迅速,而且在焊接实现的效果上也能达到预想的效果,在竞争和生产不至于处于非常被动的地位,才有发展的空间。整体实力的增长将带动整个工业机器人的发展,才能使得自动化生产取得一定的主动。1.在焊接机器人等的发展这些年,通过吸收国外技术和自身的投入,掌握住核心先进技术或者逐渐的追上国际先进水平,在技术上说的话才是竞争力的核心。2.技术的进步在实现上就需要高水平的精密技术配合,精密技术一直以来就是衡量制造生产水平的关键,也是设备实现高精密结合,是机器人在结合精密度上有很大的配合。在关节方面有着重要的作用。3.实现高精度与高技术的配合是国内的加工制造水平提高,能够在在产品的使用上实现规模化生产,各种加工设备的配套上线是整个的基础。这几年的开展时间内机器人市场竞争十分激烈,一方为国产,一方为进口,国产企业和产品在最近几年的开展时间里得政策的扶持以及很长时间内的技术积聚在产质量量上有很大进步,另外企业关于如今市场的认识足够深入,构成一个具有竞争力的整体,并在市场获得一定的位置,而国外产品则以日系,美系以及欧系为三个方面,在技术兴旺的三个国度内构成三种不同的开展形式,因技术才能,构成强大的竞争实力
进行焊接作业的时候,其熔池温度的高低与很多因素有关,包括焊条角度、焊接时间、焊条直径、焊接方法等因素,所以一旦发现熔池温度过高,就需要从这几方面入手实现降温。焊接机器人焊接过程中,焊条与焊接方向的夹角在90度时,电弧集中,熔池温度高;而夹角小,电弧分散,熔池温度较低。比如在进行12mm平焊封底层的时候,焊条角度应控制在50-70度,使熔池温度有所下降,避免了背面产生焊瘤或起高。其次,要严格控制焊接机器人系统电弧燃烧时间,断弧的频率和电弧燃烧时间直接影响着熔池温度,由于管壁较薄,电弧热量的承受能力有限,如果放慢断弧频率来降低熔池温度,易产生缩孔,所以只能用电弧燃烧时间来控制熔池温度,避免管子内部焊缝超高或产生焊瘤。正常情况下,要求根据焊缝空间位置、焊接层次来选用焊接电流和焊条直径,开焊时选用的焊接电流和焊条直径较大,立、横仰位较小。只有这样,才能更加容易控制熔池温度,使得焊缝成形。 根据以往的经验,焊接机器人采用圆圈形运条时熔池温度高于月牙形运条温度,月牙形运条温度又高于锯齿形运条的熔池温度,所以尽量采用锯齿形运条,并且用摆动的幅度和在坡口两侧的停顿,有效的控制了熔池温度。

今天我们聊的是,焊接变位机是做什么用的,?如何选择焊接变位机呢?焊接变位机主要是配合焊接设备将焊接工件回转或倾斜,使接头处于水平状态或船形位置的装置,使得焊接更加完美。但是焊接变位机种类很多,例如伸臂式变位机,坐式变位机,双立柱式变位机等等,我们怎样选择合适的呢?一:我们买的原则一般有以下所说的几点:第一是当然是工件适用原则,选择的变位机一定是适合我们自己的,第二是方便焊接的原则,因为如果连焊接都不方便,那怎么能确定工件一定能韩浩呢。第三是一定是容易操作的原则,如果操作太复杂,谁都不能保证中间会不会出现差错。二:我们需要焊接的工件不同,焊接设备差别也很大,那就需要根据您焊接工件的大小去选择,如果焊接工件并不是很大,重量在600KG以内,可以选择小型坐式变位机,价格优惠,占据的面积较小,同样可以实现90度翻转。三:当您想实现的翻转幅度稍微大一些,同样工件承重多一些,可以选择坐式变位机,翻转角度为120度,同时可以实现与操作机或者焊机联动,有三种控制系统,操作简单便捷四:L型数控变位机优点是,承载能力高,侧隙小,容易操作,并且留有很大的设计余量,从而减少工件翻转后的轴线跳动量,保证位置精度,但是它多数情况下是与机器人配套使用的。五:除了一些常规的焊接变位机,还有一部分特殊的变位机,像升降式双立柱变位机,中空环形变位机,双立柱变位机。变位机种类很多,可供选择范围也很大,如果您想买变位机却不知道如何选择的情况下,可以了解一下济南华飞数控的产品,操作简单,安全,易上手,质量也是同价位里面做的非常好的,同样会有专业的人员为您讲解,挑选最适合的产品
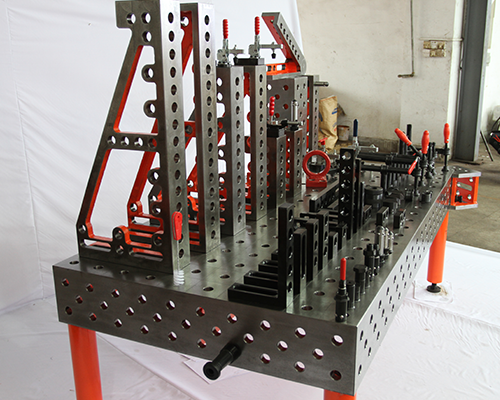
作为专业制作的厂家,我们深知三维柔性焊接平台平面度的重药性,所以在检测方法上有几种最简答的方式,我们通过这样的网站新闻栏目告诉给大家,就是为了丰富用户的专业知识,从而达到专业的水平。目前有平尺测量法,水平仪测量法,以及百分表测量法等几种!首先的平面度用平尺的检测方法是,把一根1米长的平尺放大平台的中间,用塞尺测量其空隙是多大,从而得出其精度值是多少!用千分表测量三维焊接平台的精度,用一个表座,带上千分表,用手拿方式滑行看看千分表的表针误差的最大范围以及最小范围,这样就能得出其中的精度值。
佛山机器人液压驱动:是指动源(发动机或电机)驱动油泵产生压力油,压力油再去驱动液压马达,由液压马达产生机器需要的动力。(2)气动驱动多用于开关控制和顺序控制的机器人人,与液压驱动相比较,气动驱动由于压缩空气粘度小,所以容易达到高速;由于可利用工厂集中空气压缩机站供气,减少了动力设备;空气介质不污染环境,安全高温下可正常工作;空气取之不竭用之不尽,相对于油液廉价,故气动驱动元件比液压元件价格低(3)电机驱动可分为普通交流电动机驱动,交、直流伺服电动机驱动和电动机驱动。随着材料性能的提高,电动机性能也在随之提高并且电动机使用简单,所以就目前来看,机器人驱动正逐步为电动机驱动式所代替。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


