24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

这个问题提的很好,只有通过问题才能把三维焊接平台的价格搞清楚,才能知道贵在哪里。传统的焊接平台为是什么又不如三维焊接平台呢。今天我就把这个热点话题跟大家聊一下,用户应该细心的观看这篇文章,看看是否能和你想的一样不!一:贵在精度上。传统的焊接平台是龙门铣床加工的,精度是三级精度,平面度的误差应该在20丝,这样的焊接精度已经很高了,但是依然不能和三维焊接平台相比,三维柔性焊接平台以数控龙门铣床精铣加工,精度达到1级,平面度误差咋5丝,可见价格贵东西还是有很大区别的。二:三维柔性焊接平台贵在材质上。优质的三维平台采用HT300材质,光铸造就比传统的焊接平台提高了2000元一吨,你说这样优质的原料能不贵吗!

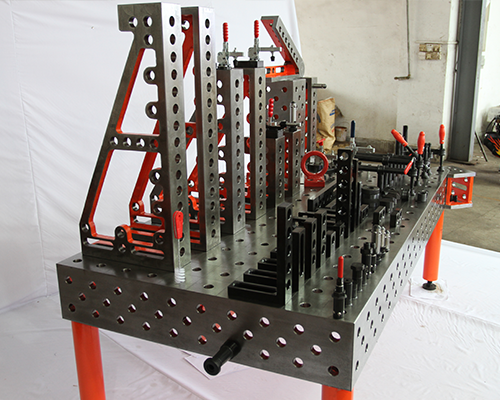
南充三维柔性焊接平台的系统构成完整的焊接机器人系统一般有如下几部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪和焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。根据用途,将工业机器人配置不同的焊接系统,将组成不同的三维柔性焊接平台系统。弧焊机器人弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。 弧焊机器人是包括电弧焊附属装置在内的柔性焊接系统,而性能有特殊的要求。在弧焊作业中,焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此运动过程中的速度稳定性和轨迹精度是两项重要指标。一般情况下,焊接速度约为5~50㎜/s,轨迹精度约为±(0.2~0.5)㎜。由于焊枪的姿态对焊缝质量有一定的影响,因此希望在跟踪焊道的同时,焊枪姿态的可调范围尽量大,其一些基本性能要求如下所示:设定焊接条件(电流、电压、速度等);摆动功能;坡口填充功能;焊接异常功能检测;焊接传感器(起始点检测、焊道跟踪)的接口功能。点焊机器人汽车工业是点焊机器人系统一个典型的应用领域。最初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:安装面积小,工作空间大;快速完成小节距的多点定位;定位精度高,以确保焊接质量;持重大,以便携带内装变压器的焊钳;内存容量大,示教简单,节省工时;点焊速度已生产线相匹配,同时按全可靠性好。
经过长时间做销售工作,我们发现有的用户对不是很了解,不明白工装夹具怎样使用,不知道焊接工作台用多大的,我们为了更好的做好销售工作,把工作中的问题进行了整理,把怎样和用户沟通进行了便捷方式,减少沟通时间,还需要要用户满意,所以总结了一下几点,请大家参考!第一:用户不要按照自己的想法以及认识来判断产品的使用与好坏。首先作为销售人员,我们需要用语言的形式跟您说明产品的大小,使用方法,配件的选配规律,用户要根据我们说的进行思考,这样有利于产品的快速了解沟通!第二:我们公司有网站,网站上有好多图片,有的是的,有的是配件的,有的是用户的工装使用哪里,哪里有图片,看看图片在根据自己的产品进行专业的选用,你要是不懂,我们还可以根据你的产品样子进行配套配置,买多了配件用上还可以原价退还,是不是很不错!第三:三维柔性焊接平台实际没什么,就是一个观念的转变,根据焊接的产品进行专业的配置,能够提高生产效率,是一件不错的产品,看看吧,只要适合你,你就采购,没事换可以咨询一下!

何曾几时突然发现三维柔性焊接平台的市场严峻起来,不好做了,通过梳理原因,发现厂家太多,相互压价格,导致同行竞争太大,没有利润了,怎么办了,听过这个栏目寻求解决办法,谈谈自己的感触。好的时候那是供不应求啊,价格保持的20%的利润,产品多的加工不过来,没想到制造行业会出现的这么快,市场突然就这样了,想办法吧!是不是每个行业都这样呢,突然不喜欢这个样了,经过简单了解,每个行业都差不多,挣钱的时候都有过辉煌,供大于求了就这样,谁也没办法,自然的淘汰呗!不过拼接工作台的基础,我们还是结交了一批优质的用户,对三维焊接工装夹具有着需求,对机床工作台还是有好感的!现在很多工厂在进行工作的过程中,对三维柔性焊接平台有越来越大的需求,这些机器主要用于机器的检验和评估,它主要包括三部分,有电源和测试系统以及操作台,对于他的每一步操作都有很严格的规定和限制,工作人员要能够正确的进行操作。技术方案有很多的人进行升级,产品参数有很大的发展可能性。现在很多的仪器和设备正在不断地发展和创新之中,在传统仪器的基础上对这些设备进行升级,相关的性能正在不断的提高,能够在很多的场所发挥作用,产品的特征具有非常多的优势和特点,三维柔性焊接平台的很多工具和操作都需要进行很多的检查,。在操作的过程中,为了能够避免很多不必要的问题,可以人工的进行数据的输入。三维柔性焊接工作台的产品就帮助人皆解决问题,提升很多设备使用的空间和可能,人们会对这些问题有好的理解,在这些基础上保证操作的可行性和相关的性能。帮助有更大的提升方法,对不同的技术,不同的人有不同的操作和提升的空间和技术操作。

在 AS系统中,机器人是以事先操作准备的程序来控制和运行的,这里对该事先操作的任务进行说明。示教再生方式AS语言可以分成两种类型:监控指令和程序命令。监控指令:用来写入、编辑和执行程序。它们在画面显示的提示符后 面输入,并且被立即执行。有些监控指令也可以作为程序命令在程序中使用。程序命令:用来引导机器人的动作,在程序中监视或控制外部信号等。程序是程序命令的集合。 在本手册中,监控指令简称为指令,程序命令简称为命令。AS在如下方面有其独特的特点1.可以使机器人沿着连续的路径轨迹运动。(称为: CP运动: Cont inuous Path (连续路径)运动)2.提供有两种坐标系统,基础坐标系和工件坐标系。可以按两种坐标系移动。3.坐标系可以按工作位姿的改变随进行平移或旋转。4.在示教位姿时,机器人可以保持工具的定向沿直线路径运动。5.程序可以自由命名和保存,而没有程序数量的限制。6.可以将每个操作定义为一个程序,并且可以将这些程序组合成-一个复杂的程序。(子程序)。7.通过监控信号通过,在某个外部信号输入时,程序可以中断,挂起当前动作,并跳转到另-一个不同的程序中。(中断)8. 没有运动指令的过程控制程序(Process Control program, 简称PC程序)可以与机器控制程序同时执行。9.程序和位姿数据可以显示在屏幕上,也能存储在PC卡等设备上。
早期只在点焊中得到应用,随着计算机技术、传感器技术的发展,弧焊机器人逐渐得到普及,特别是近十几年来由于经济的高速发展,市场的激烈竞争使那些用于中、大批量生产的焊接自动化专机已不能适应小规模、多品种的生产模式逐渐被具有柔性的焊接机器人代替,焊接机器人得到了巨大的发展,焊接已成为工业机器人应用的大领域之一,在汽车、摩托车、工程机械等领域都得到了广泛的应用。目前世界拥有的80余万台工业机器人中,用于焊接的机器人可达40%以上。机器人焊接时的主要注意事项 1.必须进行示教作业, 在机器人进行自动焊接前,操作人员必须示教机器人焊枪的轨迹和设定焊接条件等。由于必须示教,所以机器人不面向多品种少量生产的产品焊接。 2.必须确保工件的精度。机器人没有眼睛,只能重复相同的动作。机器人轨迹精度为±0.1mm,以此精度重复相同的动作。焊接偏差大于焊丝半径时,有可能焊接不好,所以工件精度应保持在焊丝半径之内。3.焊接条件的设定取决于示教作业人员的技术水平。操作人员进行示教时必须输入焊接程序,焊枪姿态和角度,电流、电压、速度等焊接条件。示教操作人员必须充分掌握焊接知识和焊接技巧。 4.必须充分注意安全,机器人是一种高速的运动设备,在其进行自动运行时绝对允许人靠近机器人。操作人员必须接受劳动安全方面的专门教育,否则不准操作。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


