24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
现在的还贵吗?是不是经常有同行或者用户再问,是的,经常有用户再问这个问题。所以在这个时间段,我们说说贵的原因所在。三维柔性焊接平台始于德国, 德国的高品质机械制造是很贵的,所以出来的焊接工作台也是售价高,人们所知道的价格就是从这里开始的。经过国产的三维焊接平台一开始就把价格降低了,这是原料,加工工时以及制度的原因,原料是国内的便宜,这是全世界都知道的事,加工工时也是便宜,处在发展中国家的阶段,这是必然的结果。看看德国,再好的产品也就是这一两家生产厂家,有利润有研发,这是他的优点,东西贵那是必然的。看看国内,生产商太多了,相互的恶性竞争也是必然,大家做的都没有利润了用户却还在砍价格,所以这就是制度的区别!

从诞生到现在,使用最多的是在焊接领域。据统计,到2007年底全世界在役的焊接机器人安装总量已接近4O万台。作为一种先进的焊接设备,其应用得到了大力的推广,是使我国焊接业进入自动化时代的一个重要标志。 随着科技水平的进步,人们对焊接质量的要求也越来越高。自动化生产要求减少人力,提高产品一致性,提高产品质量,更适合大批量生产,降低生产成本,提高生产效率。而人工焊接时,由于受到技术水平、疲劳程度、责任心、生理极限等客观和主观因素的应影响,难以较长时间保持焊接工作的稳定性和一致性。而且,由于焊接恶劣的工作条件,愿意从事手工焊接的人在减少,熟练的技术工人更有短缺的趋势。可以说,焊接机器人很大程度上满足了焊接自动化的要求,自动化生产方面的优势可以总结为以下几条:(1)稳定和提高焊接质量,保证其均一性。焊接参数如焊接电流、电压、焊接速度和干伸长量等对焊接结果有着决定作用。采用机器人焊接时,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,因此焊接质量稳定。而人工焊接时,焊接速度、干伸长量等都是变化的,很难做到质量的均一性。2)改善了劳动条件。采用机器人焊接,工人只需要装卸工件,远离了焊接弧光、炯雾和飞溅等。对于点焊来说,工人无需搬运笨重的手工焊钳,使工人从高强度的体力劳动中解脱出来。

承德烟雾净化器操控箱查看 1.锂电池替换。2.散热电扇查看。3.电缆查看4.示教器操作面板各个开关是不是正常。5.操控箱内除尘。二.烟雾净化器外部轴及定位夹具查看1.锂电池替换。 2.加注润滑油。3.衔接螺栓是不是紧固。4.运行时是不是有反常。5.定位销是不是有磨损。三.焊接机器人本体部分查看 1.机器人本体和操控箱内装有锂电池,用于伺服电机编码器数据备份,电池的运用寿命随工作环境的不一样有所改变,当超越两年时要换新电池,不然电机编码器数据将会丢掉,需要从头进行原点调整,替换前需备份示教数据,避免示教程序及设定参数丢掉。 2.原定的各轴符号是不是重合。3.主动运转,手动操作时看个轴运转是不是滑润,安稳。4.机器人安全开关,急停开关是不是正常 5.送丝组织是不是平稳。6.减速组织是不是磨损。7.齿型带松紧调整。

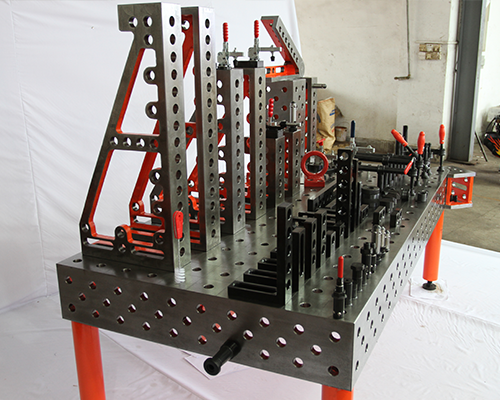
说到除焊接主体以外,还必必要用到焊接工装夹具,由于它能够将焊件精准的定位,便利焊接的进行和包管精度,有助于进步产物品质,同时还能够减轻工人的劳动量。作为的工装夹具,天然不像其余装备那么简略,必必要符合必定的设计请求能力予以利用。比如说焊接机械人工装夹具夹紧时不该损坏焊件的表面品质,特别以在夹紧薄件的时刻,应限定夹紧力或许采纳压头行程限位、加大压头接触面积、添补铜、铝衬套等步伐,做到夹紧靠得住,刚性恰当。 不仅是表面品质,焊接的定位位置和多少外形也不能被焊接机械人的工装夹具影响,要做到夹紧后既不使焊件松动滑移,又不使焊件的拘谨渡过大而生产较大的应力,这是最根本的、其次,焊接机械人工装夹具的施力点应位于焊件的支承处或许布置在靠近支承的地方,并且要防止支承反力与夹紧力、支承反力与重力构成力偶。为了便于节制,在同一个夹具上,定位器和夹紧机构的布局情势不宜过量,并且尽量只选用一种动力源。既然是与焊接机械人共同利用,那么它本身应举措敏捷、操纵便利,操纵位置应处在工人轻易靠近、最易操纵的部位。当夹具处于夹紧状况时,应能自锁;同时还要有充足的安装、焊接空间,所有的定位元件和夹紧机构应与焊道坚持恰当的间隔。焊接机械人的工装夹具除具备上述特性以外,在自动化、机械化等方面都起着异常紧张的作用,是焊接事情可否完成高速、高效、周详、复合、智能、环保等目标的症结地点。
的系统构成完整的焊接机器人系统一般有如下几部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪和焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。根据用途,将工业机器人配置不同的焊接系统,将组成不同的系统。弧焊机器人弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。 弧焊机器人是包括电弧焊附属装置在内的柔性焊接系统,而性能有特殊的要求。在弧焊作业中,焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此运动过程中的速度稳定性和轨迹精度是两项重要指标。一般情况下,焊接速度约为5~50㎜/s,轨迹精度约为±(0.2~0.5)㎜。由于焊枪的姿态对焊缝质量有一定的影响,因此希望在跟踪焊道的同时,焊枪姿态的可调范围尽量大,其一些基本性能要求如下所示:设定焊接条件(电流、电压、速度等);摆动功能;坡口填充功能;焊接异常功能检测;焊接传感器(起始点检测、焊道跟踪)的接口功能。点焊机器人汽车工业是点焊机器人系统一个典型的应用领域。最初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:安装面积小,工作空间大;快速完成小节距的多点定位;定位精度高,以确保焊接质量;持重大,以便携带内装变压器的焊钳;内存容量大,示教简单,节省工时;点焊速度已生产线相匹配,同时按全可靠性好。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


