24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
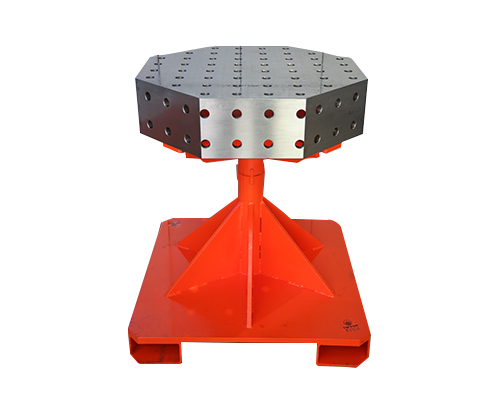
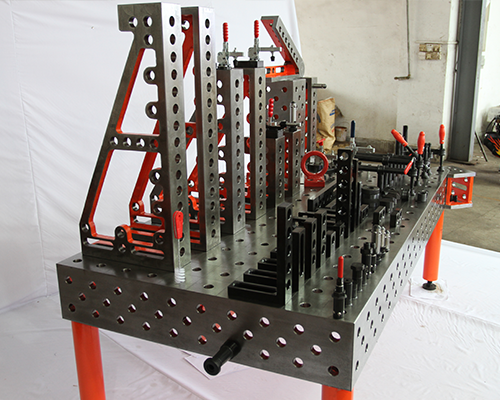
今天我们聊的是铝焊机器人供应,焊接变位机是做什么用的,?如何选择焊接变位机呢?焊接变位机主要是配合焊接设备将焊接工件回转或倾斜,使接头处于水平状态或船形位置的装置,使得焊接更加完美。但是焊接变位机种类很多,例如伸臂式变位机,坐式变位机,双立柱式变位机等等,我们怎样选择合适的呢?一:我们买铝焊机器人供应的原则一般有以下所说的几点:第一是当然是工件适用原则,选择的变位机一定是适合我们自己的,第二是方便焊接的原则,因为如果连焊接都不方便,那怎么能确定工件一定能韩浩呢。第三是一定是容易操作的原则,如果操作太复杂,谁都不能保证中间会不会出现差错。二:我们需要焊接的工件不同,焊接设备差别也很大,那就需要根据您焊接工件的大小去选择,如果焊接工件并不是很大,重量在600KG以内,可以选择小型坐式变位机,价格优惠,占据的面积较小,同样可以实现90度翻转。三:当您想实现的翻转幅度稍微大一些,同样工件承重多一些,可以选择坐式变位机,翻转角度为120度,同时可以实现与操作机或者焊机联动,有三种控制系统,操作简单便捷四:L型数控变位机优点是,承载能力高,侧隙小,容易操作,并且留有很大的设计余量,从而减少工件翻转后的轴线跳动量,保证位置精度,但是它多数情况下是与机器人配套使用的。五:除了一些常规的焊接变位机,还有一部分特殊的变位机,像升降式双立柱变位机,中空环形变位机,双立柱变位机。变位机种类很多,可供选择范围也很大,如果您想买变位机却不知道如何选择的情况下,可以了解一下济南华飞数控的产品,操作简单,安全,易上手,质量也是同价位里面做的非常好的,同样会有专业的人员为您讲解,挑选最适合的产品

缺陷的解决方式: (1)出现气孔可能为气体保护差、工件的底漆太厚或者保护气不够干燥,进行相应的调整就可以处理。(2)出现焊偏可能为焊接的位置不正确或焊枪寻找时出现问题。这时,要考虑TCP(焊枪中心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下各轴的零位置,重新校零予以修正。(3)飞溅过多可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。(4)焊缝结尾处冷却后形成一弧坑,编程时在工作步中添加埋弧坑功能,可以将其填满。(5)出现咬边可能为焊接参数选择不当、焊枪角度或焊枪位置不对,可适当调整功率的大小来改变焊接参数,调整焊枪的姿态以及焊枪与工件的相对位置
具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。焊接机器人硬件部分采用的是柔性控制,将PLC和触摸屏完美结合之后,就能实现控制的自动化、远程,化从而有效的达到高精度的控制效果。由于焊接机器人针对不同规格,不同形状的产品,它的控制方式也是不同的,因此要注意从各方面使硬件部分达到最佳。另外,从焊接机器人的械结构、控制方式、产能要求、环保要求

液压驱动:是指动源(发动机或电机)驱动油泵产生压力油,压力油再去驱动液压马达,由液压马达产生机器需要的动力。(2)气动驱动多用于开关控制和顺序控制的人,与液压驱动相比较,气动驱动由于压缩空气粘度小,所以容易达到高速;由于可利用工厂集中空气压缩机站供气,减少了动力设备;空气介质不污染环境,安全高温下可正常工作;空气取之不竭用之不尽,相对于油液廉价,故气动驱动元件比液压元件价格低(3)电机驱动可分为普通交流电动机驱动,交、直流伺服电动机驱动和电动机驱动。随着材料性能的提高,电动机性能也在随之提高并且电动机使用简单,所以就目前来看,机器人驱动正逐步为电动机驱动式所代替。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


