24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

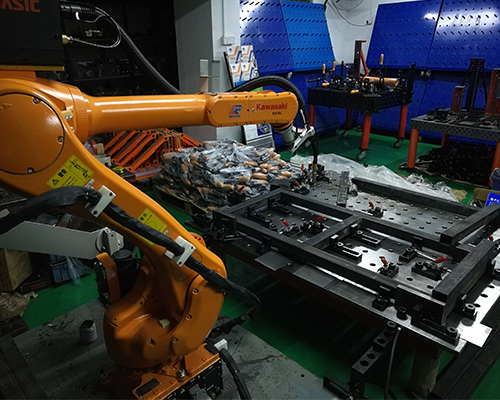
不仅兼具了效率高和效率稳定这两点优势,而且还具备良好的灵活性,即使是再复杂的环境,也能保证其稳定高效的运行。这与焊接机器人的构成是分不开的,包括了焊接机器人主体、焊接电源、一维重型滑台、机器人L臂、清枪剪丝站、控制系统等装置。那么焊接机器人的焊接质量又如何呢?如果说手工焊接后焊缝表面会出现一片片黄色的覆盖物,那焊接的时候只要多加注意就可以避免类似问题的发生,确保焊接质量能够达标。首先我们要知道这个黄色的东西其实是焊丝和焊接母材里的杂质,主要是硅锰元素在焊接过程中高温氧化跟保护气体中的CO2产生化学反应,分解形成氧化硅、氧化锰形成的氧化物,有点类似于手工焊条焊接时的焊渣。虽然这些现象即使用焊接机器人也会产生,但是这些氧化物除了外观有点瑕疵外并不会对焊接品质造成什么不良影响,用刷子也能很容易的清除掉。焊接母材的金属元素中多少会有一些硅锰元素,这种现象肯定会存在的,如果想要减少这些氧化物,可以选用含硅锰元素少点的焊丝,保护气体换成CO2含量少的混合气,焊接出来的氧化物就会少些,黄色的斑就会少很多。

在 AS系统中,机器人是以事先操作准备的程序来控制和运行的,这里对该事先操作的任务进行说明。示教再生方式AS语言可以分成两种类型:监控指令和程序命令。监控指令:用来写入、编辑和执行程序。它们在画面显示的提示符后 面输入,并且被立即执行。有些监控指令也可以作为程序命令在程序中使用。程序命令:用来引导机器人的动作,在程序中监视或控制外部信号等。程序是程序命令的集合。 在本手册中,监控指令简称为指令,程序命令简称为命令。AS在如下方面有其独特的特点1.可以使机器人沿着连续的路径轨迹运动。(称为: CP运动: Cont inuous Path (连续路径)运动)2.提供有两种坐标系统,基础坐标系和工件坐标系。可以按两种坐标系移动。3.坐标系可以按工作位姿的改变随进行平移或旋转。4.在示教位姿时,机器人可以保持工具的定向沿直线路径运动。5.程序可以自由命名和保存,而没有程序数量的限制。6.可以将每个操作定义为一个程序,并且可以将这些程序组合成-一个复杂的程序。(子程序)。7.通过监控信号通过,在某个外部信号输入时,程序可以中断,挂起当前动作,并跳转到另-一个不同的程序中。(中断)8. 没有运动指令的过程控制程序(Process Control program, 简称PC程序)可以与机器控制程序同时执行。9.程序和位姿数据可以显示在屏幕上,也能存储在PC卡等设备上。

销售焊接机器人般是与焊接滚轮架、焊接变位机等组合使用的,多在些制造焊接之类的工厂使用,这种机器使用起来方便快捷,人只需要在操控台操控它工作。这种高科技智能产品是怎么设计的呢?今天博塔重工带我们来探究竟。焊接操作机设计方案应遵循6大原则1、工艺性,仅有合理的结构设计而无良好的工艺性,必然导致操作机性能的降低和成本的提高。焊接机器人是种高精度、高集成度的自动机械系统,良好的加工和装配工艺性是设计时要体现的重要原则之。2、高强度材料选用,由于操作机从手腕、小臂、大臂到机座是依次作为负载起作用的,选用高强度材料时应以减轻零部件的质量为准则。3、可靠性,般来说,元器件的可靠性应高于部件的可靠性,而部件的可靠性应高于整机的可靠性。可以通过概率设计方法设计出可靠度满足要求的零件或结构,也可以通过系统可靠性综合方法评定操作机系统的可靠性。焊接操作机因机构复杂、环节较多,可靠性问题显得尤为重要。4、刚度设计,操作机设计中刚度是比强度更重要的问题,要使刚度大,必须恰当地选择杆件剖面形状和尺寸,提高支承刚度和接触刚度,合理地安排作用在臂杆上的力和力矩,尽量减少杆件的弯曲变形。5、尺度规划优化原则,当设计要求满足定工作空间要求时,通过尺度优化以选定小的臂杆尺寸,这将有利于焊接操作机刚度的提高,使运动惯量进步降低。6、运动惯量,由于焊接操作机运动部件多,运动状态经常改变,必然产生冲击和振动,采用小运动惯量原则,可增加操作机运动平稳性,提高操作机动力学性。为此,在设计时应注意在满足强度和刚度的前提下,尽量减小运动部件的质量,并注意运动部件对转轴的质心配置。
的基本功用首要有八个方面,如下所示:①回忆功用:存储作业顺序、运动途径、运动方法、运动速度和与生产工艺有关的信息。②示教功用:离线编程、在线示教、直接示教。在线示教包含示教盒和扶引示教两与外围设备联络功用:输入和输出接口、通讯接口、网络接口、同步接口。坐标设置功用:有关节坐标系、绝对坐标系、东西坐标系和用户自定义四种坐标系。⑤人机接口:示教盒、操作面板、显示屏。⑥传感器接口:方位检测、视觉、触觉、力觉等。⑦方位伺服功用:多轴联动、运动操控、速度和加速度操控、动态补偿等。⑧故障确诊安全维护功用:运行时体系状况监视、故障状况下的安全维护和故障自确诊。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


