24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

原材料直接关系着它的品质,一般国内的产品都是HT200--HT250材质,这种材质价格适中,但是强度低,一本国外的产品都是标准的HT300材质,所以价格欲质量还是有差异的。怎样提高国内的产品质量呢?只有增加材质的配比,才能把握好,又因国内的市场贪图价格的居多,所以很难做好货销售,优质的一般是出口!平台对硬度有比较好的需求,通常平台的硬度越高,以后能够使用的场所越多,所以如何提升它的硬度成了非常重要的技术,下面我们就来看看都有哪些方法能够提升钳工平台的硬度吧。第一/提升铸铁原材料出炉的时候的温度。钢铁溶液出炉的时候的温度与铸铁的硬度是有非常大的关系的,因为温度越高,钢铁溶液中的杂质就被融化的越多,其中含有的杂质越少,并且更加不容易发生氧化,自然也就能够拥有更高的硬度。所以,如果想要三维柔性焊接平台拥有更高的硬度,提升它的出炉温度,就能做到,提升出炉温度可以通过改造铁炉的内部结构,同时加强送风的强度,在熔铁的时候使用更好的焦炭,这样就能提升铁溶夜的出炉温度了。第二/让晶粒得到充分细化。不管是铸铁还是其他金属,晶粒的大小就能直接影响到它的硬度和一些物理性能。钳工平台也是一样,原材料的晶粒越细,金属强度和硬度也能够更加出色。一般在铸铁出炉的时候就对它做孕育处理,就能将晶粒充分细化,从而让整个钳工平台质量更上乘,硬度更出色。当然,让三维柔性焊接平台硬度更高,除了这些技术性的手段,还有一个非常重要且有效的方法,那就是选择硬度更高,杂质更少,物理性能更稳定的原材料,就根本上控制好质量。在制作过程中钳工平台可以分为四个精度,精度越高,要求也就越高。

是一个加热和冷却相结合的过程,所以在这一过程中,焊接区有可能会因为受到工件本体的拘谨而不能自在胀大和缩短,但在冷却后在便产生焊接应力和变形。当然这是传统焊接工艺的缺陷,焊接机器人的运用已经解决了这一问题,纠正了焊接变形。像这样的现代焊接设备,加上已经成熟的焊接技术,能焊出优异的焊缝。焊接接头处的强度除受焊缝质量影响外,还与其几许形状、尺度、受力状况和作业条件等有关,而对接接头焊缝的横截面形状,决定于被焊接体在焊接前的厚度和两接边的坡口方式。在利用焊接机器人焊接较厚的钢板时,为了焊透而在接边处开出各种形状的坡口,以便较容易地送入焊条或焊丝。挑选坡口方式时,除确保焊透外还应思考施焊便利,填充金属量少,焊接变形小和坡口加工费用低等要素。而如果是换成两块不一样的钢板,为避免截面急剧改变引起严重的应力会集,常把较厚的板边逐步削薄,达到两接边处等厚。在交变、冲击载荷下或在低温高压容器中作业的联接,常优先选用对接接头的焊接。将来的焊接技能,一方面要研发更先进的焊接办法、焊接设备和焊接材料,以进一步提高焊接质量和安全可靠性。另一方面要进步焊接机械化和主动化水平,就是像焊接机器人这样的设备的运用。
惠州自动焊接机器人在 AS系统中,机器人是以事先操作准备的程序来控制和运行的,这里对该事先操作的任务进行说明。示教再生方式AS语言可以分成两种类型:监控指令和程序命令。监控指令:用来写入、编辑和执行程序。它们在画面显示的提示符后 面输入,并且被立即执行。有些监控指令也可以作为程序命令在程序中使用。程序命令:用来引导机器人的动作,在程序中监视或控制外部信号等。程序是程序命令的集合。 在本手册中,监控指令简称为指令,程序命令简称为命令。AS在如下方面有其独特的特点1.可以使机器人沿着连续的路径轨迹运动。(称为: CP运动: Cont inuous Path (连续路径)运动)2.提供有两种坐标系统,基础坐标系和工件坐标系。可以按两种坐标系移动自动焊接机器人。3.坐标系可以按工作位姿的改变随进行平移或旋转。4.在示教位姿时,机器人可以保持工具的定向沿直线路径运动。5.程序可以自由命名和保存,而没有程序数量的限制。6.可以将每个操作定义为一个程序,并且可以将这些程序组合成-一个复杂的程序。(子程序)。7.通过监控信号通过,在某个外部信号输入时,程序可以中断,挂起当前动作,并跳转到另-一个不同的程序中。(中断)8. 没有运动指令的过程控制程序(Process Control program, 简称PC程序)可以与机器控制程序同时执行。9.程序和位姿数据可以显示在屏幕上,也能存储在PC卡等设备上。

中国市场很广,每个生产加工环节都是非常重要的,就行我们最近几年引进消化销售制作的,发展到现在出现了两种路子,一种是质量第一,按照质量制作,保证产品的特点,最大程度的接近仿制产品,这就是一个发展方向,还有一个是低质低价的发展,铸件有沙眼,平面不好,工装夹具也是精密度不高,但是便宜,中国人爱徒便宜的不少,目前市场就是这连个特点方向共存!市场的引导是非常重要的,通过专业的技术进行检测,验收,给每个厂家进行专业的知道,走高标准发展路线也是国家产业提升的一个重要方向,如果始终以低价发展就会造成各种的不利,在发展几年,用户的使用消费发生变化,再改高端怕是已经晚了,所以说应该看远点,质量为王是发展方向!低端的制造也是在浪费资料,浪费资源,所以需要我们认识这个制造业提升的发展方向,把焊接工作台以及三维焊接平台的精度,铸件,工装夹具都提高才是王道!

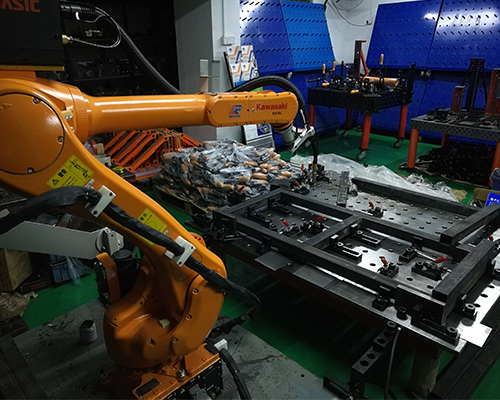
为什么被称为焊接机器人? 因为它与人类具有相同的“大脑”。 今天,让我们来看看生活中越来越常用的一些越来越重要的焊接机器人。许多人实际上将多定义为能够控制自己,做某些动作或做其他事情。 实际上,焊接机器人具有各种内部信息传感器和外部信息传感器,例如视觉,听觉,触觉和嗅觉。 除了具有感受器之外,它还具有作为对周围环境起作用的手段的效应器。 这是移动手,脚,长鼻子,触须等的肌肉或自行式马达。接机器人要注意的三个基本要素一,感官元素,焊接机器人用于识别周围环境的状态; 感觉元件包括可以感测视觉,接近度,距离等的非接触式传感器,以及可以感测,压力,触摸等的接触传感器。 这些元素基本上相当于人眼,鼻子,耳朵等功能,它们的功能可以使用机电元件,如相机,图像传感器,超声波发射器,激光器,导电橡胶,压电元件,气动元件,行程开关等。 设备已实现。 二,体育要素,对外界的反应行动; 对于移动元件,焊接机器人需要具有无轨移动机构以适应不同的地理环境,例如平面,台阶,墙壁,楼梯和坡道。 它们的功能可以通过诸如轮子,轨道,支脚,吸盘,气垫等的移动机构来实现。 移动机制应在移动过程中实时控制。 该控制不仅必须包括位置控制,还必须包括力控制,位置和力混合控制以及膨胀比控制。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


