24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
我们都知道,焊接业中应用的企业比比皆是,那是因为机器人不仅生产效率高,而且优点有很多,这也是为什么企业用焊接机器人取代传统手工的重要原因。焊接机器人不仅兼具了效率高和效率稳定这两点优势,而且还具备良好的灵活性,即使是再复杂的环境,也能保证其稳定高效的运行。这与的构成是分不开的,包括了焊接机器人主体、焊接电源、一维重型滑台、机器人L臂、清枪剪丝站、控制系统等装置。那么焊接机器人的焊接质量又如何呢?如果说手工焊接后焊缝表面会出现一片片黄色的覆盖物,那焊接机器人焊接的时候只要多加注意就可以避免类似问题的发生,确保焊接质量能够达标。首先我们要知道这个黄色的东西其实是焊丝和焊接母材里的杂质,主要是硅锰元素在焊接过程中高温氧化跟保护气体中的CO2产生化学反应,分解形成氧化硅、氧化锰形成的氧化物,有点类似于手工焊条焊接时的焊渣。虽然这些现象即使用焊接机器人也会产生,但是这些氧化物除了外观有点瑕疵外并不会对焊接品质造成什么不良影响,用刷子也能很容易的清除掉。焊接母材的金属元素中多少会有一些硅锰元素,这种现象肯定会存在的,如果想要减少这些氧化物,可以选用含硅锰元素少点的焊丝,保护气体换成CO2含量少的混合气,焊接出来的氧化物就会少些,黄色的斑就会少很多。
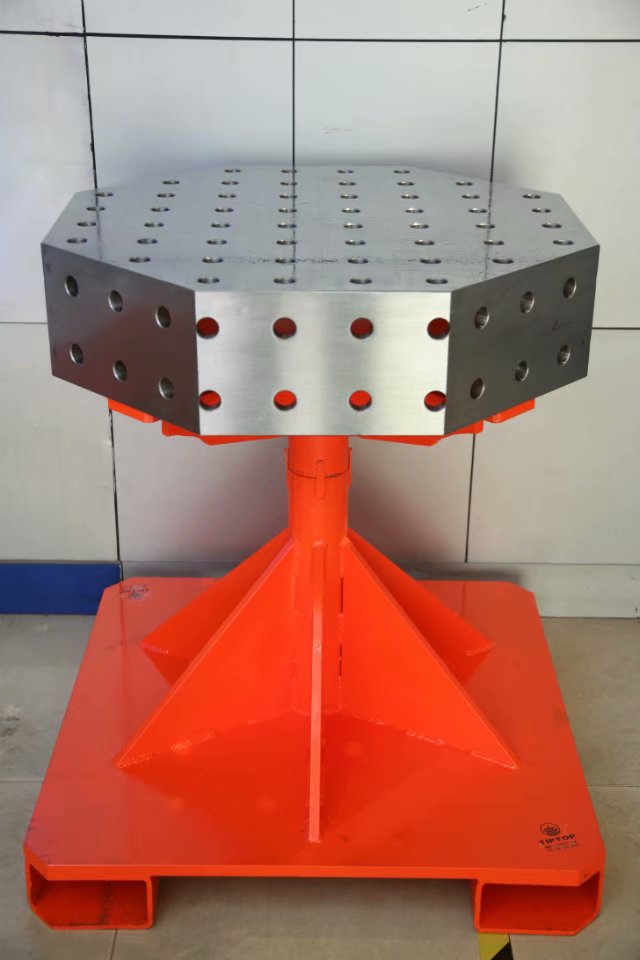
今天我们聊的是,焊接变位机是做什么用的,?如何选择焊接变位机呢?焊接变位机主要是配合焊接设备将焊接工件回转或倾斜,使接头处于水平状态或船形位置的装置,使得焊接更加完美。但是焊接变位机种类很多,例如伸臂式变位机,坐式变位机,双立柱式变位机等等,我们怎样选择合适的呢?一:我们买的原则一般有以下所说的几点:第一是当然是工件适用原则,选择的变位机一定是适合我们自己的,第二是方便焊接的原则,因为如果连焊接都不方便,那怎么能确定工件一定能韩浩呢。第三是一定是容易操作的原则,如果操作太复杂,谁都不能保证中间会不会出现差错。二:我们需要焊接的工件不同,焊接设备差别也很大,那就需要根据您焊接工件的大小去选择,如果焊接工件并不是很大,重量在600KG以内,可以选择小型坐式变位机,价格优惠,占据的面积较小,同样可以实现90度翻转。三:当您想实现的翻转幅度稍微大一些,同样工件承重多一些,可以选择坐式变位机,翻转角度为120度,同时可以实现与操作机或者焊机联动,有三种控制系统,操作简单便捷四:L型数控变位机优点是,承载能力高,侧隙小,容易操作,并且留有很大的设计余量,从而减少工件翻转后的轴线跳动量,保证位置精度,但是它多数情况下是与机器人配套使用的。五:除了一些常规的焊接变位机,还有一部分特殊的变位机,像升降式双立柱变位机,中空环形变位机,双立柱变位机。变位机种类很多,可供选择范围也很大,如果您想买变位机却不知道如何选择的情况下,可以了解一下济南华飞数控的产品,操作简单,安全,易上手,质量也是同价位里面做的非常好的,同样会有专业的人员为您讲解,挑选最适合的产品

缺陷的解决方式: (1)出现气孔可能为气体保护差、工件的底漆太厚或者保护气不够干燥,进行相应的调整就可以处理。(2)出现焊偏可能为焊接的位置不正确或焊枪寻找时出现问题。这时,要考虑TCP(焊枪中心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下各轴的零位置,重新校零予以修正。(3)飞溅过多可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。(4)焊缝结尾处冷却后形成一弧坑,编程时在工作步中添加埋弧坑功能,可以将其填满。(5)出现咬边可能为焊接参数选择不当、焊枪角度或焊枪位置不对,可适当调整功率的大小来改变焊接参数,调整焊枪的姿态以及焊枪与工件的相对位置
为什么被称为焊接机器人? 因为它与人类具有相同的“大脑”。 今天,让我们来看看生活中越来越常用的一些越来越重要的焊接机器人。许多人实际上将多定义为能够控制自己,做某些动作或做其他事情。 实际上,焊接机器人具有各种内部信息传感器和外部信息传感器,例如视觉,听觉,触觉和嗅觉。 除了具有感受器之外,它还具有作为对周围环境起作用的手段的效应器。 这是移动手,脚,长鼻子,触须等的肌肉或自行式马达。接机器人要注意的三个基本要素一,感官元素,焊接机器人用于识别周围环境的状态; 感觉元件包括可以感测视觉,接近度,距离等的非接触式传感器,以及可以感测,压力,触摸等的接触传感器。 这些元素基本上相当于人眼,鼻子,耳朵等功能,它们的功能可以使用机电元件,如相机,图像传感器,超声波发射器,激光器,导电橡胶,压电元件,气动元件,行程开关等。 设备已实现。 二,体育要素,对外界的反应行动; 对于移动元件,焊接机器人需要具有无轨移动机构以适应不同的地理环境,例如平面,台阶,墙壁,楼梯和坡道。 它们的功能可以通过诸如轮子,轨道,支脚,吸盘,气垫等的移动机构来实现。 移动机制应在移动过程中实时控制。 该控制不仅必须包括位置控制,还必须包括力控制,位置和力混合控制以及膨胀比控制。

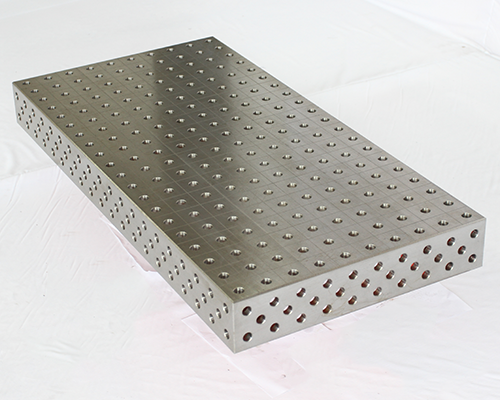
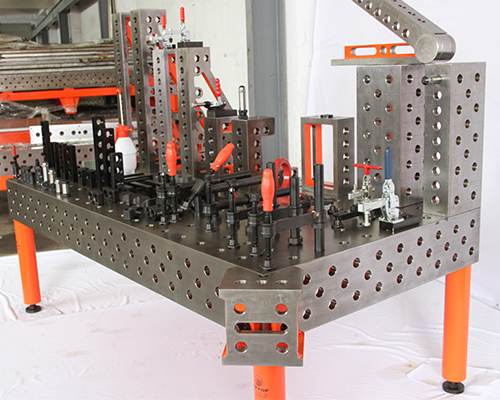
秦皇岛焊接机械臂的主要特点与公用就是把工件定位,工装,进行焊接,达到专业的精密焊接要求,配有工装夹具配套使用,所以这就是三维柔性焊接平台的优点。其表面的光洁度其实没什么意义,这又不是检测平台,没必要看那一点技术,只要整体的精度用数控加工制造就行。再说了,焊接的工件误差一般是按照毫米计算的,所以光洁度对于焊接工业没有意义。做什么我们就研究什么,就像焊接机械臂,把握住主要的特点,满足用户的焊接要求水平,保证焊接过程中实际对位以及工件的严词合缝。虽然三维柔性平台的种类也是非常的多的,但是对于有些企业来讲,他们也是没有办法去符合要求,就是每个企业的流水线都是完全的不一样,所以他们对于这些设备的要求也是完全的不同的,但只要选择一个比较适合自己的产品就是可以的。而且企业总归是要选择一个设备来进行生产,所以并不是说三维柔性平台可以满足每个企业的要求,这样也是不太可能的,不可能有任何产品可以垄断整个市场,因此他们必须要分出一些市场。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


