24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋
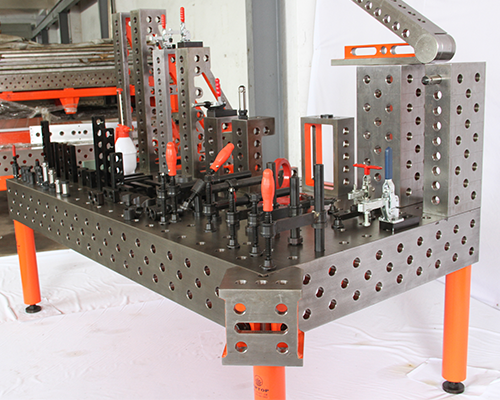
我们都知道,焊接业中应用的企业比比皆是,那是因为机器人不仅生产效率高,而且优点有很多,这也是为什么企业用焊接机器人取代传统手工的重要原因。焊接机器人不仅兼具了效率高和效率稳定这两点优势,而且还具备良好的灵活性,即使是再复杂的环境,也能保证其稳定高效的运行。这与的构成是分不开的,包括了焊接机器人主体、焊接电源、一维重型滑台、机器人L臂、清枪剪丝站、控制系统等装置。那么焊接机器人的焊接质量又如何呢?如果说手工焊接后焊缝表面会出现一片片黄色的覆盖物,那焊接机器人焊接的时候只要多加注意就可以避免类似问题的发生,确保焊接质量能够达标。首先我们要知道这个黄色的东西其实是焊丝和焊接母材里的杂质,主要是硅锰元素在焊接过程中高温氧化跟保护气体中的CO2产生化学反应,分解形成氧化硅、氧化锰形成的氧化物,有点类似于手工焊条焊接时的焊渣。虽然这些现象即使用焊接机器人也会产生,但是这些氧化物除了外观有点瑕疵外并不会对焊接品质造成什么不良影响,用刷子也能很容易的清除掉。焊接母材的金属元素中多少会有一些硅锰元素,这种现象肯定会存在的,如果想要减少这些氧化物,可以选用含硅锰元素少点的焊丝,保护气体换成CO2含量少的混合气,焊接出来的氧化物就会少些,黄色的斑就会少很多。

在 AS系统中,机器人是以事先操作准备的程序来控制和运行的,这里对该事先操作的任务进行说明。示教再生方式AS语言可以分成两种类型:监控指令和程序命令。监控指令:用来写入、编辑和执行程序。它们在画面显示的提示符后 面输入,并且被立即执行。有些监控指令也可以作为程序命令在程序中使用。程序命令:用来引导机器人的动作,在程序中监视或控制外部信号等。程序是程序命令的集合。 在本手册中,监控指令简称为指令,程序命令简称为命令。AS在如下方面有其独特的特点1.可以使机器人沿着连续的路径轨迹运动。(称为: CP运动: Cont inuous Path (连续路径)运动)2.提供有两种坐标系统,基础坐标系和工件坐标系。可以按两种坐标系移动。3.坐标系可以按工作位姿的改变随进行平移或旋转。4.在示教位姿时,机器人可以保持工具的定向沿直线路径运动。5.程序可以自由命名和保存,而没有程序数量的限制。6.可以将每个操作定义为一个程序,并且可以将这些程序组合成-一个复杂的程序。(子程序)。7.通过监控信号通过,在某个外部信号输入时,程序可以中断,挂起当前动作,并跳转到另-一个不同的程序中。(中断)8. 没有运动指令的过程控制程序(Process Control program, 简称PC程序)可以与机器控制程序同时执行。9.程序和位姿数据可以显示在屏幕上,也能存储在PC卡等设备上。

服务过程主要九大点,以下一一给大家讲解:(1)机器人工作状况确认:确认机器人生产工作状况,确认进行常规保养前机器人经过至少超过1个小时停机(保证换油正常,不被本体温度影响)2)机器人系统备份:所有机器人在进行常规保养前确认完系统状态后,进行系统备份。(备份体现当前信息)3)型号确认,油卡制定:确认机器人本体型号,确定各轴注油口和出油口位置,以及工具需求,确定各轴换油的油品种类以及各轴用油量; (4)更换本体油脂:拆除出油口和注油口的油封,在注油口处安装油嘴,出油口处进行废油收集。利用油枪进行注油,在出油口观察出油状态,确认出油口流出新油后停止加油,按照此流程完成机器人6各轴的注油工作,并注意废油的收集;(5)机器人运动测试:油脂加注完成后,机器人进行运动测试,确认油脂加注稳定性(此时,不要将注油口和出油口的油封安装)(6)完成油封安装:将注油口,油嘴取下,将油封涂液体生胶带,安装紧固 (7)皮带张力检测:打开机器人四轴外壳,利用张力测试仪测试机器人皮带张力(频率)是否正常 (8)电池更换:更换机器人本体编码器电池保持机器人处于正常上电状态(前提)打开机器人一轴尾部电池外盖,拔掉电池更换新电池(9)电气柜检测清理:保持控制器上电状态,确认控制器风扇工作状态,断电拆驱动,移除风扇,清理,驱动模块散热片清理。清理完成后,安装,开机上电,运行机器人确认状态正常后,完成电气柜清理

韶关焊接机械手产品的设计有的时候对于产品的整个销量还是有影响的,如果他这个产品在设计的时候没有一个比较好的设计理念的话,这样的产品到了市场上面是没有太大的商量的,因为三维柔性焊接平台设计理念是非常的好的,也是可以满足很多消费者的需求,所以他们在市场上面还是很受欢迎的。尤其是三维柔性焊接平台的设计外观,也是比一般的产品要好很多的,因为现在很多人还是比较喜欢外观好看的产品。毕竟现在有很多的产品,它们的功能都是差不多的,都是可以帮助企业解决问题,但是企业到底选择购买什么样的产品,其实也是要考虑好这个产品的设计理念的,如果焊接机械手价格,三维柔性焊接平台,焊接工作台的设计理念比较差的话,这样的产品虽然说质量是没有问题的,但是仍然是无法满足消费者的需求,所以市场上面自然是没有太大的销量。因为,三维柔性焊接平台是有这样的优势的,所以受到人们欢迎。所以对于一些生产的企业,他们也是要考虑好这些问题的,如果自己购买一些生产理念并不是很好的产品回来的话,可能也是造成一种极大的浪费的,因为这些产品并不能帮助我们解决问题的,反倒是给我们带来了一定的压力的,所以对于这些企业,他们也要做出一个慎重的选择的,如果他们可以使用三维柔性焊接平台,就是不用担心这么麻烦的,也是可以很好的帮助自己发展。
经过长时间做销售工作,我们发现有的用户对不是很了解,不明白工装夹具怎样使用,不知道焊接工作台用多大的,我们为了更好的做好销售工作,把工作中的问题进行了整理,把怎样和用户沟通进行了便捷方式,减少沟通时间,还需要要用户满意,所以总结了一下几点,请大家参考!第一:用户不要按照自己的想法以及认识来判断产品的使用与好坏。首先作为销售人员,我们需要用语言的形式跟您说明产品的大小,使用方法,配件的选配规律,用户要根据我们说的进行思考,这样有利于产品的快速了解沟通!第二:我们公司有网站,网站上有好多图片,有的是的,有的是配件的,有的是用户的工装使用哪里,哪里有图片,看看图片在根据自己的产品进行专业的选用,你要是不懂,我们还可以根据你的产品样子进行配套配置,买多了配件用上还可以原价退还,是不是很不错!第三:三维柔性焊接平台实际没什么,就是一个观念的转变,根据焊接的产品进行专业的配置,能够提高生产效率,是一件不错的产品,看看吧,只要适合你,你就采购,没事换可以咨询一下!

为什么被称为焊接机器人? 因为它与人类具有相同的“大脑”。 今天,让我们来看看生活中越来越常用的一些越来越重要的焊接机器人。许多人实际上将多定义为能够控制自己,做某些动作或做其他事情。 实际上,焊接机器人具有各种内部信息传感器和外部信息传感器,例如视觉,听觉,触觉和嗅觉。 除了具有感受器之外,它还具有作为对周围环境起作用的手段的效应器。 这是移动手,脚,长鼻子,触须等的肌肉或自行式马达。接机器人要注意的三个基本要素一,感官元素,焊接机器人用于识别周围环境的状态; 感觉元件包括可以感测视觉,接近度,距离等的非接触式传感器,以及可以感测,压力,触摸等的接触传感器。 这些元素基本上相当于人眼,鼻子,耳朵等功能,它们的功能可以使用机电元件,如相机,图像传感器,超声波发射器,激光器,导电橡胶,压电元件,气动元件,行程开关等。 设备已实现。 二,体育要素,对外界的反应行动; 对于移动元件,焊接机器人需要具有无轨移动机构以适应不同的地理环境,例如平面,台阶,墙壁,楼梯和坡道。 它们的功能可以通过诸如轮子,轨道,支脚,吸盘,气垫等的移动机构来实现。 移动机制应在移动过程中实时控制。 该控制不仅必须包括位置控制,还必须包括力控制,位置和力混合控制以及膨胀比控制。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


