24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

进行焊接作业的时候,其熔池温度的高低与很多因素有关,包括焊条角度、焊接时间、焊条直径、焊接方法等因素,所以一旦发现熔池温度过高,就需要从这几方面入手实现降温。焊接机器人焊接过程中,焊条与焊接方向的夹角在90度时,电弧集中,熔池温度高;而夹角小,电弧分散,熔池温度较低。比如在进行12mm平焊封底层的时候,焊条角度应控制在50-70度,使熔池温度有所下降,避免了背面产生焊瘤或起高。其次,要严格控制焊接机器人系统电弧燃烧时间,断弧的频率和电弧燃烧时间直接影响着熔池温度,由于管壁较薄,电弧热量的承受能力有限,如果放慢断弧频率来降低熔池温度,易产生缩孔,所以只能用电弧燃烧时间来控制熔池温度,避免管子内部焊缝超高或产生焊瘤。正常情况下,要求根据焊缝空间位置、焊接层次来选用焊接电流和焊条直径,开焊时选用的焊接电流和焊条直径较大,立、横仰位较小。只有这样,才能更加容易控制熔池温度,使得焊缝成形。 根据以往的经验,焊接机器人采用圆圈形运条时熔池温度高于月牙形运条温度,月牙形运条温度又高于锯齿形运条的熔池温度,所以尽量采用锯齿形运条,并且用摆动的幅度和在坡口两侧的停顿,有效的控制了熔池温度。

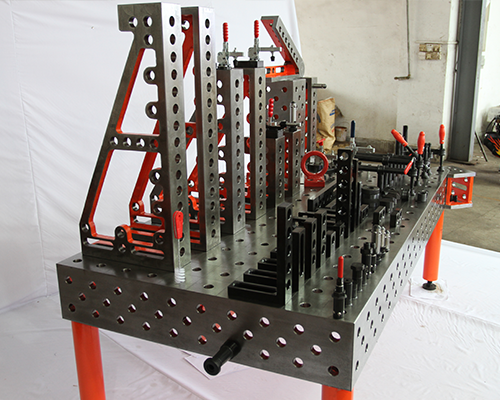
我们都知道,焊接业中应用焊接机器人的企业比比皆是,那是因为机器人不仅生产效率高,而且优点有很多,这也是为什么企业用取代传统手工的重要原因。不仅兼具了效率高和效率稳定这两点优势,而且还具备良好的灵活性,即使是再复杂的环境,也能保证其稳定高效的运行。这与的构成是分不开的,包括了焊接机器人主体、焊接电源、一维重型滑台、机器人L臂、清枪剪丝站、控制系统等装置。那么焊接机器人的焊接质量又如何呢?如果说手工焊接后焊缝表面会出现一片片黄色的覆盖物,那焊接机器人焊接的时候只要多加注意就可以避免类似问题的发生,确保焊接质量能够达标。首先我们要知道这个黄色的东西其实是焊丝和焊接母材里的杂质,主要是硅锰元素在焊接过程中高温氧化跟保护气体中的CO2产生化学反应,分解形成氧化硅、氧化锰形成的氧化物,有点类似于手工焊条焊接时的焊渣。虽然这些现象即使用焊接机器人也会产生,但是这些氧化物除了外观有点瑕疵外并不会对焊接品质造成什么不良影响,用刷子也能很容易的清除掉。焊接母材的金属元素中多少会有一些硅锰元素,这种现象肯定会存在的,如果想要减少这些氧化物,可以选用含硅锰元素少点的焊丝,保护气体换成CO2含量少的混合气,焊接出来的氧化物就会少些,黄色的斑就会少很多。
一个产品质量又好,价格还低廉,这是不成正比的。其实我们个人即是生产也是采购者。我从事三维柔性焊接平台这个行业,对柔性焊接平台的质量,制作流程以及价格最有发言权,我们就最近一段时间市场上出现的价格比较低廉的做个解释!如果你是一个生产者,是一个从事铸造,机械加工,产品销售的工作人员或者老板来说你就会明白其中的道理,中国是个大市场,一些是技术要求能够满足实际需要就行了,不需要特别的好,市场是需要竞争的,总有些市场规律在里面你不知道!铸件有点遐思,铸造有缺陷,加工设备自己做的,整体精度差,但是不影响使用,外表不美观,有修补,这些因素就是市场上的三维柔性焊接平台为什么价格超低的原因所在!

为什么三维柔性焊接平台被称为焊接机器人? 因为它与人类具有相同的“大脑”。 今天,让我们来看看生活中越来越常用的一些越来越重要的焊接机器人。许多人实际上将多三维柔性焊接平台供应定义为能够控制自己,做某些动作或做其他事情。 实际上,焊接机器人具有各种内部信息传感器和外部信息传感器,例如视觉,听觉,触觉和嗅觉。 除了具有感受器之外,它还具有作为对周围环境起作用的手段的效应器。 这是移动手,脚,长鼻子,触须等的肌肉或自行式马达。接机器人要注意的三个基本要素一,感官元素,焊接机器人用于识别周围环境的状态; 感觉元件包括可以感测视觉,接近度,距离等的非接触式传感器,以及可以感测,压力,触摸等的接触传感器。 这些元素基本上相当于人眼,鼻子,耳朵等功能,它们的功能可以使用机电元件,如相机,图像传感器,超声波发射器,激光器,导电橡胶,压电元件,气动元件,行程开关等。 设备已实现。 二,体育要素,对外界的反应行动; 对于移动元件,焊接机器人需要具有无轨移动机构以适应不同的地理环境,例如平面,台阶,墙壁,楼梯和坡道。 它们的功能可以通过诸如轮子,轨道,支脚,吸盘,气垫等的移动机构来实现。 移动机制应在移动过程中实时控制。 该控制不仅必须包括位置控制,还必须包括力控制,位置和力混合控制以及膨胀比控制。
服务过程主要九大点,以下一一给大家讲解:(1)机器人工作状况确认:确认机器人生产工作状况,确认进行常规保养前机器人经过至少超过1个小时停机(保证换油正常,不被本体温度影响)2)机器人系统备份:所有机器人在进行常规保养前确认完系统状态后,进行系统备份。(备份体现当前信息)3)型号确认,油卡制定:确认机器人本体型号,确定各轴注油口和出油口位置,以及工具需求,确定各轴换油的油品种类以及各轴用油量; (4)更换本体油脂:拆除出油口和注油口的油封,在注油口处安装油嘴,出油口处进行废油收集。利用油枪进行注油,在出油口观察出油状态,确认出油口流出新油后停止加油,按照此流程完成机器人6各轴的注油工作,并注意废油的收集;(5)机器人运动测试:油脂加注完成后,机器人进行运动测试,确认油脂加注稳定性(此时,不要将注油口和出油口的油封安装)(6)完成油封安装:将注油口,油嘴取下,将油封涂液体生胶带,安装紧固 (7)皮带张力检测:打开机器人四轴外壳,利用张力测试仪测试机器人皮带张力(频率)是否正常 (8)电池更换:更换机器人本体编码器电池保持机器人处于正常上电状态(前提)打开机器人一轴尾部电池外盖,拔掉电池更换新电池(9)电气柜检测清理:保持控制器上电状态,确认控制器风扇工作状态,断电拆驱动,移除风扇,清理,驱动模块散热片清理。清理完成后,安装,开机上电,运行机器人确认状态正常后,完成电气柜清理

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


