24小时服务热线 15820416931 |

24小时服务热线 15820416931 |

联系人:黄先生
电 话:15820416931
网 址:www.jzczn.cn
邮 箱:szjzczn@163.com
地 址:深圳市宝安区松岗街道东风新村105栋

茂名焊接平台从诞生到现在,使用最多的是在焊接领域。据统计,到2007年底全世界在役的焊接机器人安装总量已接近4O万台。焊接平台作为一种先进的焊接设备,其应用得到了大力的推广,是使我国焊接业进入自动化时代的一个重要标志。 随着科技水平的进步,人们对焊接质量的要求也越来越高。自动化生产要求减少人力,提高产品一致性,提高产品质量,更适合大批量生产,降低生产成本,提高生产效率。而人工焊接时,由于受到技术水平、疲劳程度、责任心、生理极限等客观和主观因素的应影响,难以较长时间保持焊接工作的稳定性和一致性。而且,由于焊接恶劣的工作条件,愿意从事手工焊接的人在减少,熟练的技术工人更有短缺的趋势。可以说,焊接机器人很大程度上满足了焊接自动化的要求,自动化生产方面的优势可以总结为以下几条:(1)稳定和提高焊接质量,保证其均一性。焊接参数如焊接电流、电压、焊接速度和干伸长量等对焊接结果有着决定作用。采用机器人焊接时,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,因此焊接质量稳定。而人工焊接时,焊接速度、干伸长量等都是变化的,很难做到质量的均一性。2)改善了劳动条件。采用机器人焊接,工人只需要装卸工件,远离了焊接弧光、炯雾和飞溅等。对于点焊来说,工人无需搬运笨重的手工焊钳,使工人从高强度的体力劳动中解脱出来。
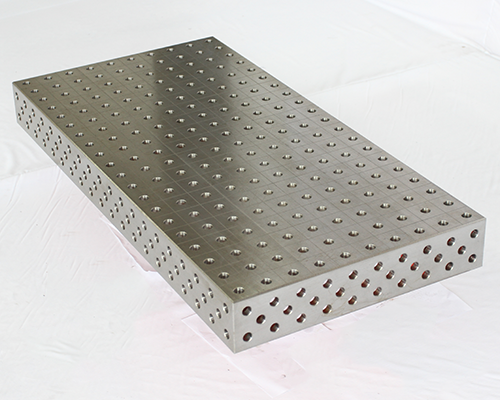
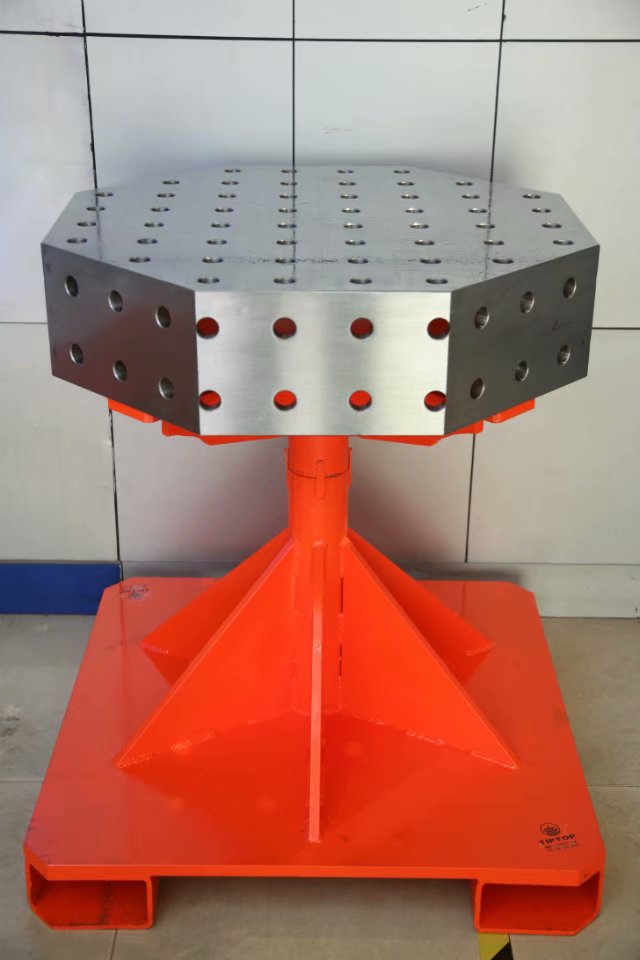
说到除焊接主体以外,还必必要用到焊接工装夹具,由于它能够将焊件精准的定位,便利焊接的进行和包管精度,有助于进步产物品质,同时还能够减轻工人的劳动量。作为的工装夹具,天然不像其余装备那么简略,必必要符合必定的设计请求能力予以利用。比如说焊接机械人工装夹具夹紧时不该损坏焊件的表面品质,特别以在夹紧薄件的时刻,应限定夹紧力或许采纳压头行程限位、加大压头接触面积、添补铜、铝衬套等步伐,做到夹紧靠得住,刚性恰当。 不仅是表面品质,焊接的定位位置和多少外形也不能被焊接机械人的工装夹具影响,要做到夹紧后既不使焊件松动滑移,又不使焊件的拘谨渡过大而生产较大的应力,这是最根本的、其次,焊接机械人工装夹具的施力点应位于焊件的支承处或许布置在靠近支承的地方,并且要防止支承反力与夹紧力、支承反力与重力构成力偶。为了便于节制,在同一个夹具上,定位器和夹紧机构的布局情势不宜过量,并且尽量只选用一种动力源。既然是与焊接机械人共同利用,那么它本身应举措敏捷、操纵便利,操纵位置应处在工人轻易靠近、最易操纵的部位。当夹具处于夹紧状况时,应能自锁;同时还要有充足的安装、焊接空间,所有的定位元件和夹紧机构应与焊道坚持恰当的间隔。焊接机械人的工装夹具除具备上述特性以外,在自动化、机械化等方面都起着异常紧张的作用,是焊接事情可否完成高速、高效、周详、复合、智能、环保等目标的症结地点。

液压驱动:是指动源(发动机或电机)驱动油泵产生压力油,压力油再去驱动液压马达,由液压马达产生机器需要的动力。(2)气动驱动多用于开关控制和顺序控制的人,与液压驱动相比较,气动驱动由于压缩空气粘度小,所以容易达到高速;由于可利用工厂集中空气压缩机站供气,减少了动力设备;空气介质不污染环境,安全高温下可正常工作;空气取之不竭用之不尽,相对于油液廉价,故气动驱动元件比液压元件价格低(3)电机驱动可分为普通交流电动机驱动,交、直流伺服电动机驱动和电动机驱动。随着材料性能的提高,电动机性能也在随之提高并且电动机使用简单,所以就目前来看,机器人驱动正逐步为电动机驱动式所代替。

存在部分焊接的问题:可能存在焊接位置不正确或焊枪正在寻找的问题。 此时,考虑TCP(焊枪中心点位置)是否正确并进行调整。 如果经常发生这种情况,请检查机器人每个轴的零位并校正中心零点。2)咬边问题:焊接参数选择不当,焊枪角度或焊枪位置不正确,可以适当调整。(3)可能出现毛孔问题:可能会适当调整气体保护不良,底漆过厚或工件位置不正确。(4)溅射问题太多:焊接参数选择不当,气体成分部分或焊丝长度过长,可适当调整功率,改变焊接参数,调整气体配比仪表 调整混合气体的比例。 调整割炬与工件的相对位置。(5)焊接机器人在焊接结束后冷却后形成一个凹坑:当它是可编程的时,在工作步骤中加入一个可以填充的埋弧工作。
早期只在点焊中得到应用,随着计算机技术、传感器技术的发展,弧焊机器人逐渐得到普及,特别是近十几年来由于经济的高速发展,市场的激烈竞争使那些用于中、大批量生产的焊接自动化专机已不能适应小规模、多品种的生产模式逐渐被具有柔性的焊接机器人代替,焊接机器人得到了巨大的发展,焊接已成为工业机器人应用的大领域之一,在汽车、摩托车、工程机械等领域都得到了广泛的应用。目前世界拥有的80余万台工业机器人中,用于焊接的机器人可达40%以上。机器人焊接时的主要注意事项 1.必须进行示教作业, 在机器人进行自动焊接前,操作人员必须示教机器人焊枪的轨迹和设定焊接条件等。由于必须示教,所以机器人不面向多品种少量生产的产品焊接。 2.必须确保工件的精度。机器人没有眼睛,只能重复相同的动作。机器人轨迹精度为±0.1mm,以此精度重复相同的动作。焊接偏差大于焊丝半径时,有可能焊接不好,所以工件精度应保持在焊丝半径之内。3.焊接条件的设定取决于示教作业人员的技术水平。操作人员进行示教时必须输入焊接程序,焊枪姿态和角度,电流、电压、速度等焊接条件。示教操作人员必须充分掌握焊接知识和焊接技巧。 4.必须充分注意安全,机器人是一种高速的运动设备,在其进行自动运行时绝对允许人靠近机器人。操作人员必须接受劳动安全方面的专门教育,否则不准操作。

扫描加微信
联系人:黄先生 联系电话:15820416931
 | 地址:深圳市宝安区松岗街道东风新村105栋 | ||
 | szjzczn@163.com | ||
15820416931
服 务 热 线


